Cameras are a fundamental component in mobile robotics, providing essential visual data that enables robots to perceive, interpret, and interact with their surroundings. In this custom integration, our team outfitted the Jackal UGV mobile base with an array of FLIR... read more
On Thursday, June 26th, we celebrated our new robot badlands (aka: our brand new headquarters) with a grand opening, accompanied of course by a robot ribbon-cutting. Clearpath co-founders made their way to the stage and gathered around ‘Jake’, the PR2.... read more
So you have had a taste of driving a virtual Husky in our previous post, but now want to try something a little bigger? How about 2000 lbs bigger? Read on to learn how to drive a (virtual) Grizzly, Clearpath Robotic’s largest and meanest platform. If you are... read more
I recently spent over a week in Montreal talking with – and learning from – the Canadian field robotics community, first at the Computer and Robot Vision (CRV) conference and then at the NCFRN Field Trials. This was my first time attending CRV since I spoke at the... read more
Happy Birthday Clearpath!! We are officially 5 years old and what better way to celebrate than let all of our fans drive a robot. No matter where you are in the world, you can experience what it’s like to drive Husky – well, a very mini, hacked-together Husky... read more
The Intelligent Ground Vehicle Competition is held every year for robotics teams to design and build autonomous – wait for it – ground vehicles, capable of completing a variety of challenges. Each summer some of the best university teams around the globe flock to... read more
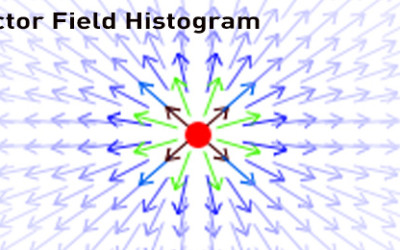
Local path planning is an integral part of robotics and there are numerous methods for achieving this. One such method is the Vector Field Histogram (VFH). The main idea behind this method of navigation is that through the robot’s sensors, it is able to detect... read more
Reposted with permission from IEEE Spectrum. Original post available here. No matter how much time and energy and money we put into a robot, it’s going to be a very very very long time before we come up with anything that’s anywhere close to as capable as... read more
What do Grizzly, Husky and Kingfisher all have in common? They all started as an idea. And who helps to bring our bots from a sketch on a whiteboard to the real deal? No other than Clearpath’s design team. To learn more about what really goes on before robots hit... read more