
by Darby Mills | Apr 9, 2026 | Blog, Teaching and Learning |
Before you can test drive your shiny new robot and move it to its new home, you’re going to need to connect it to the Bluetooth controller. If you’re wanting more detailed instructions than the user manual, or need to do some troubleshooting, this blog will walk you...

by Darby Mills | Feb 12, 2026 | Blog, Teaching and Learning |
Getting your robot up and running isn’t just about powering it on—it’s about connecting it to a larger ecosystem. Our robotic platforms rely on wireless communication protocols to enable remote access to the onboard ROS environment, making development, monitoring, and...
by Darby Mills | Jan 29, 2026 | Blog, Clearpath FAQ, Teaching and Learning |
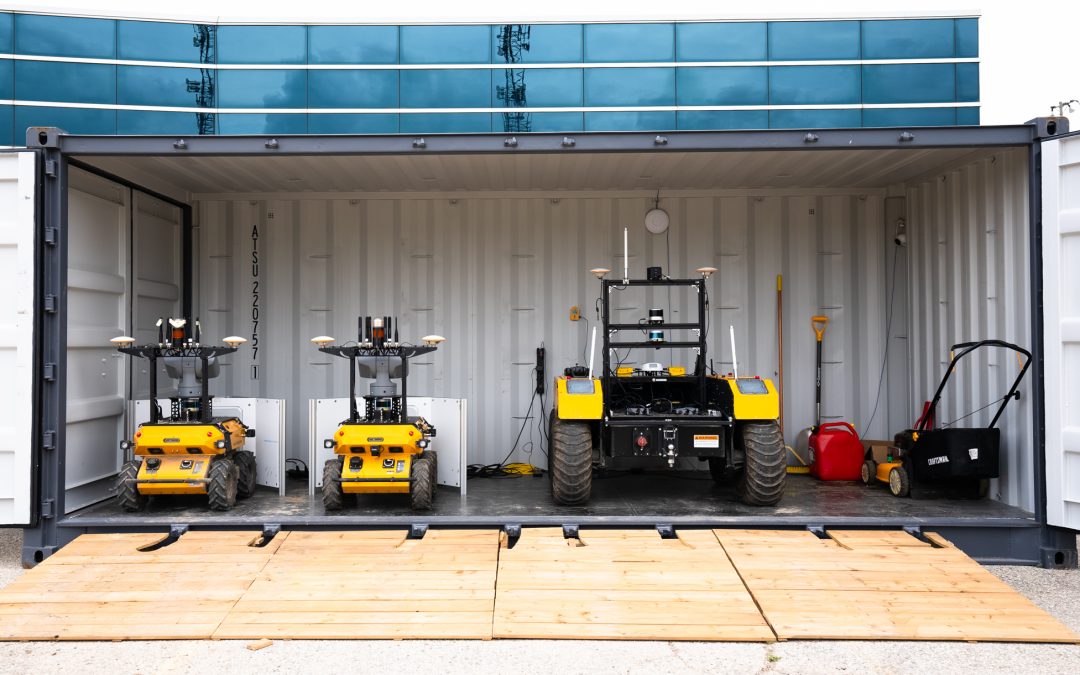
Choosing the right robotics platform can be the difference between a smooth deployment and months of rework. With so many variables to consider — operating environment, vehicle size, payload capacity, maximum speed, endurance, and integration requirements — it’s not...

by Darby Mills | Jan 15, 2026 | Blog, ROS Spotlight, Software Updates, Teaching and Learning |
Upgrading your robot’s software is more than just keeping up with the latest releases; it’s about ensuring long-term reliability, performance, and compatibility across diverse hardware configurations. In this post, we will cover the current ROS 2 upgradability...

by Darby Mills | Nov 19, 2025 | Blog, Teaching and Learning |
If you’re stepping into the world of robotics, the TurtleBot 4 is one of the most popular platforms to learn and build with. It’s powered by ROS 2, comes with a mobile base, sensors, and compute hardware. It is designed to help you explore everything from basic...

by Darby Mills | Apr 15, 2025 | Blog, Teaching and Learning |
A Practical Guide for Getting More from Your Wi-Fi If you’ve ever worked with mobile robots over Wi-Fi, you’ve likely run into this scenario: You’ve set up a robot with a camera, maybe two. You’re out in the field—or even just across the lab—trying to...
