
Original blog post written by Andrew Keefe of Systems Intelliegence Solutions
We were incredibly excited to recently see Systems Intelligence Solutions publish the work they’ve been doing with Boston Dynamics‘ Spot based on the ROS Driver we released for the robot in September 2020. With the addition of our ROS Package for Spot, researchers can now take full advantage of ROS capabilities out-of-the-box, and leverage widely available open-source libraries, tools, and the greater ROS community to fast-track their robotics development. With our ROS driver, users can easily unlock the ability to control the robot and access all the onboard sensing data streams, including odometry, images, and point clouds from each of the five on-board stereo cameras, plus data from any additional payloads they choose to integrate.

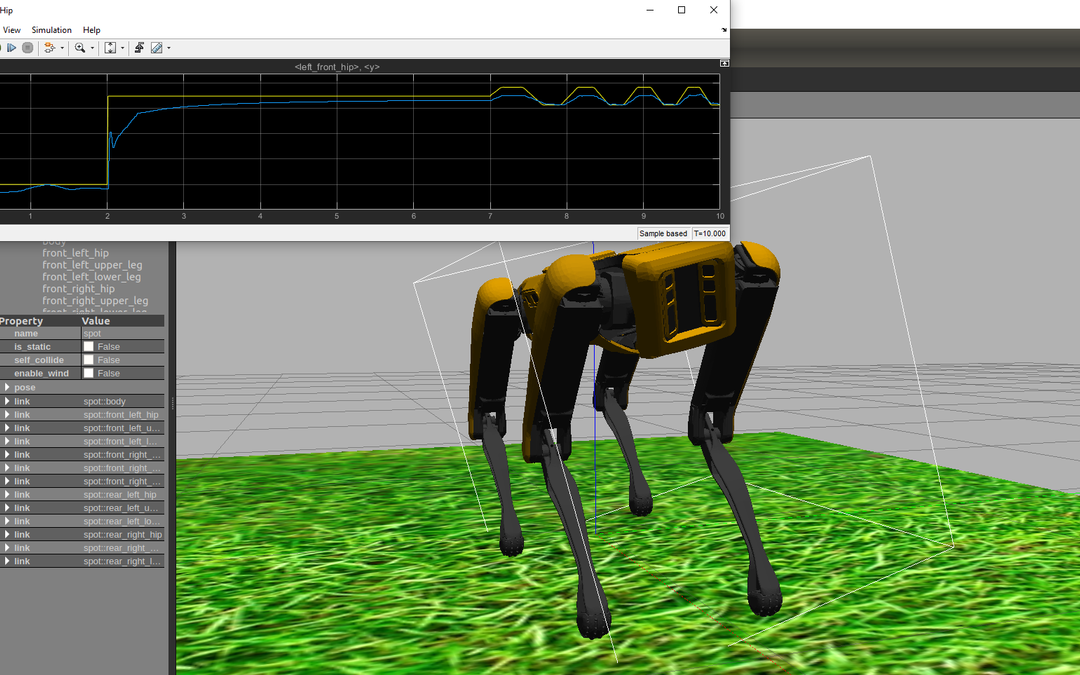
To enhance simulation applications, the Systems Intelligence Solutions team created a Gazebo SDF file based on the information found within our ROS driver, as well as a MATLAB-Simulink controller that would allow Spot to more physically engage with the Gazebo environment. By enabling functions to stand and walk in place, it is much easier to test and analyze the way the robot would function in real-world applications.
You can check out the full post over on Systems Intelligence Solutions’ blog.
To learn more about our ROS package for Spot feel free to check out our website.