
by Mike Purvis | Oct 15, 2013 | Teaching and Learning |
The beginnings of the ROS packages for Husky were created almost three years ago. The first debs were released in August 2011, for ROS Electric. Since then, we’ve released debs into Fuerte and Groovy, and we’ve shipped many, many Husky units out to...

by Mike Purvis | Sep 17, 2013 | Teaching and Learning |
Beginning about two years ago, ROS began the process of migrating its build system, which is an important infrastructure component. The original ROS build system was called rosbuild, and its replacement is catkin. Why the change? There are a variety of motivations...
by Mike Purvis | Feb 26, 2013 | Teaching and Learning |
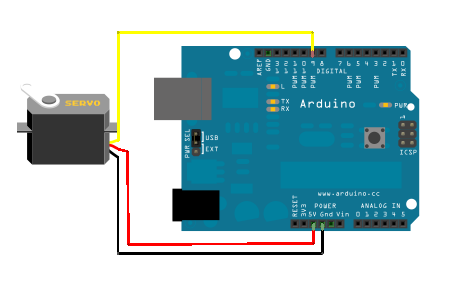
This year, we launched an all-new version of our Kingfisher surface vessel. Like many ROS robots, its onboard linux PC is supplemented with a microcontroller, which handles low-level tasks like monitoring ADCs and driving motors. When prototyping the new Kingfisher we...
