
by Meghan Hennessey | Oct 30, 2015 | Teaching and Learning |
Your organization is growing so fast that you can’t keep up. One of your facilities isn’t operating at peak efficiency. Your company is a victim of labour shortage. These challenges have lead you to proactively look for ways to improve your operation – you need to in...
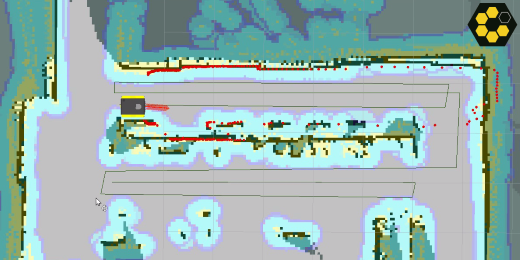
by Ilia Baranov | Apr 29, 2015 | Teaching and Learning |
In this new Robots 101 series, we will be taking a look at how robots work, what makes designing them challenging, and how engineers at Clearpath Robotics tackle these problems. To successfully operate in the real world, robots need to be able to see obstacles around...

by Ilia Baranov | Mar 16, 2015 | Teaching and Learning |
Enabling the Kinect V2 for PR2 has been a little tricky. The very high bandwidth of the sensor (almost fully saturating USB 3.0) combined with the high frame-rate of the sensor means that a dedicated computer is usually needed for data processing. Luckily the PR2 team...
by Martin Cote | Jan 19, 2015 | Teaching and Learning |
The Arduino family of micro controllers has quickly become a go-to board for hobbyists due to its ease of use. Often times roboticists must create communication protocols to allow their embedded hardware to communicate with a computer. One of the most powerful aspects...

by Martin Cote | Dec 11, 2014 | Teaching and Learning |
We previously learned how to write a publisher node to move Husky randomly. BUT! What good is publishing all these messages if no one is there to read it? In this tutorial we’ll write a subscriber that reads Husky’s position from the odom topic, and graph...

by Martin Cote | Oct 30, 2014 | Teaching and Learning |
Whether you have a Jackal UGV or not, the Jackal simulator is a great way to get started with ROS robot development. In this tutorial, we will go through the basics of starting Gazebo and Rviz and how to drive your Jackal around. If you are new to ROS, it’s...
