
After more than 15 years in the industry, Clearpath Robotics is well known for our black and yellow mobile robots. With various form factors for different terrains, these platforms continue to be the ideal starting point for conducting research and automating industrial processes. What makes these powerful robots go the step further is the integration services our team provides, working with you to bring your robot vision to life! Whether it’s integrated with sensors, accessories, software, or other payloads, this is how your robot becomes a true solution.
For robotics researchers and teams developing autonomous systems, integrating sensors onto a mobile platform requires balancing mechanical constraints, power availability, networking, software compatibility, and environmental protection. A structured integration process helps ensure that sensors and payload systems work reliably together while remaining maintainable and extensible for future research.
This guide outlines Clearpath’s typical levels of platform integration and walks through the process you can expect during your robot customization journey.

Levels of Integration
Sensor and payload integration projects can vary widely depending on the complexity of the system being built on one of our base robotic platforms (Warthog, Husky, Jackal, Ridgeback, Dingo) or autonomous mobile platform (AMP) solution.
Standard integrations typically involve adding a few supported components such as computer hardware, networking equipment, cameras, LiDAR, GNSS, manipulators, or upgraded batteries. This level of integration focuses on mounting sensors leveraging PACS, providing power and communication interfaces, and ensuring the platform can support the payload reliably.
Complex integrations involve deeper mechanical and system modifications. These projects might include many standard components, new or novel components, ROS driver development, custom metalwork structures and enclosures, or specialized structural components designed to support unique research payloads.
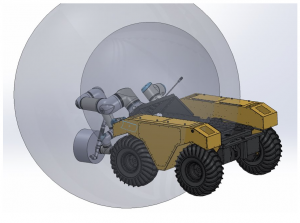
Engineering services integrations go beyond the robot platform itself. These projects can include third-party vehicle refits, experimental robotics platforms, or specialized capabilities such as virtual twin mapping and advanced environment modeling. These projects often require detailed systems design, custom ROS development, or new autonomy features.
Customers can also choose to integrate OutdoorNAV, our outdoor autonomy navigation software, for reliable, industry-leading GPS-based navigation to increase the speed and efficiency of autonomous vehicle development.
Integration Process
Every project comes with its own set of needs, so there’s no one-size-fits-all approach to integration. That’s why the Clearpath team works closely with each customer to shape the customization process around their specific requirements and circumstances. It’s a collaborative effort designed to make sure the final product is an effective addition to your workflow.

Initial Consultation
Every integration project starts by understanding what the research team is trying to achieve. During the initial consultation, the focus is on identifying the project’s key value drivers. These often include overall project goals, stakeholder requirements, development timelines, and available budget. Clearpath and/or the customer may make “napkin sketches” of the system, or workflow diagrams for how the system should work.
Technical Scoping
Once the objectives are defined, the next step is translating them into detailed technical requirements. Technical scoping involves working with the client to define and refine the system architecture. This can include determining sensor placement, computer requirements, networking architecture, power budgets, and environmental considerations such as vibration, weather exposure, or temperature.
This phase also evaluates whether the proposed system is technically and financially feasible. Certain sensor combinations may exceed payload limits or power capacity, requiring adjustments to the design. At the end of technical scoping, the integration team typically provides a rough order-of-magnitude (ROM) estimate for cost and timeline so that stakeholders can evaluate the project before moving forward.
Concept Proposal
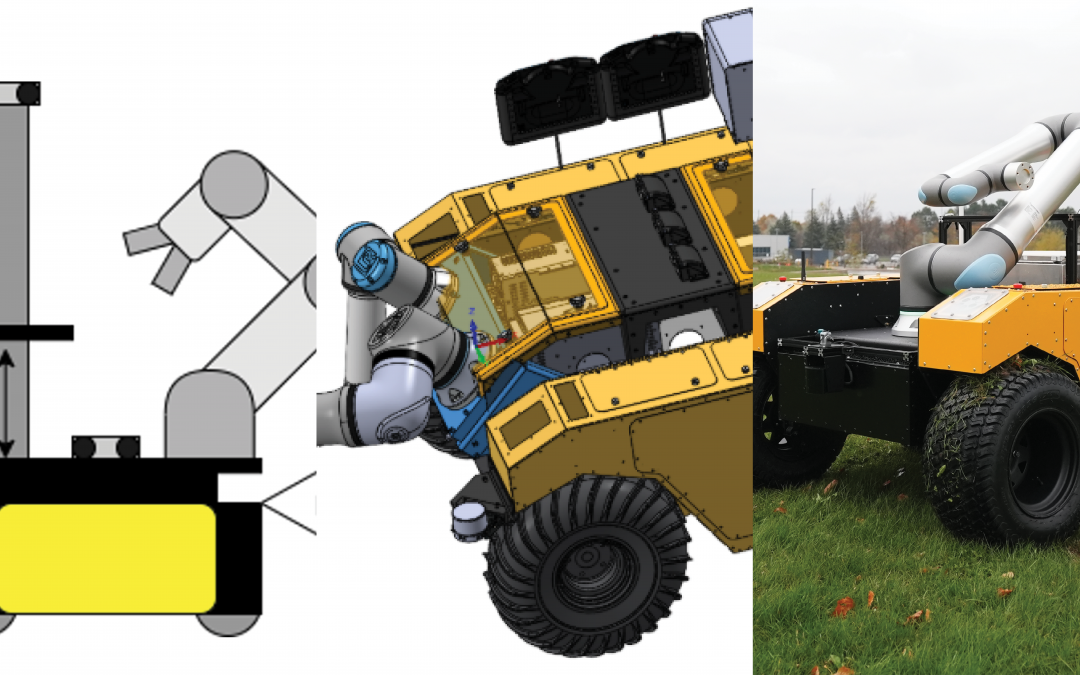
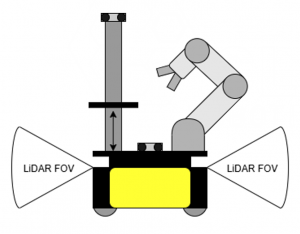
With requirements established, integrators begin developing conceptual integration designs. The concept proposal outlines the major system components and how they interact, including sensor mounting strategies, computer placement, networking architecture, and power distribution. During this stage, integrators evaluate trade-offs between performance, cost, and system complexity. For example, raising a LiDAR on a taller mast may improve perception range but increase structural loads and center-of-gravity concerns.
Power consumption, payload capacity, and network bandwidth may also be modeled to ensure the platform can reliably support the sensor suite. The outcome of this phase is typically one or more conceptual integration designs that balance the project’s requirements with practical engineering constraints.
This phase enables our customers to more accurately evaluate trade-offs in cost and performance between different solutions.
Detailed Design
After a concept is approved, the project moves into detailed engineering. The mechanical design phase develops precise layouts for all sensors, computer units, and structural components. This includes mounting brackets, sensor risers, cable routing, and protective enclosures where needed. The electrical design defines power distribution, communication interfaces, and safety considerations. Detailed schematics are created to ensure that sensors, computer systems, and networking equipment operate reliably together.
On the software side, integration may involve creating URDF models for the robot configuration, integrating ROS drivers for sensors, and developing scripts or packages for data synchronization, logging, and navigation. At this stage, the full system architecture is finalized and ready for implementation.
Build and Integration
The final stage is physical assembly and system integration. Components are sourced and prepared, followed by in-house mechanical assembly and installation of sensors, computer hardware, and networking systems. Wiring harnesses and power distribution systems are installed according to the electrical design.
Next, hardware and software are integrated so that sensors communicate correctly with the onboard computer stack and the broader robotics software framework. A structured test plan is then executed to verify sensor functionality, data integrity, synchronization, and system stability under real operating conditions.
Finally, comprehensive documentation is produced covering system configuration, wiring diagrams, software setup, and maintenance procedures. This ensures researchers can maintain and extend the platform as their projects evolve.
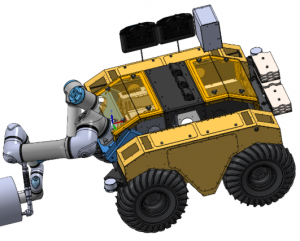
Example Integrations
Check out some of our recent integrations that have come through the shop below and on our YouTube channel.





Wrap Up
Integrating sensors and payload systems onto autonomous ground robots is a multidisciplinary engineering effort that touches mechanical design, electrical systems, networking, and robotics software. Following a structured integration process—from consultation and technical scoping through design, build, and testing—research teams can count on Clearpath to develop robust, custom robotic solutions to support their complex research and industrial needs.
Let our experts turn your robot from just a platform into a real-world solution! Contact our integration services team to get started on your custom robot development today.