by Chris Bogdon | Mar 30, 2016 | Robot Forge, ROS Spotlight |
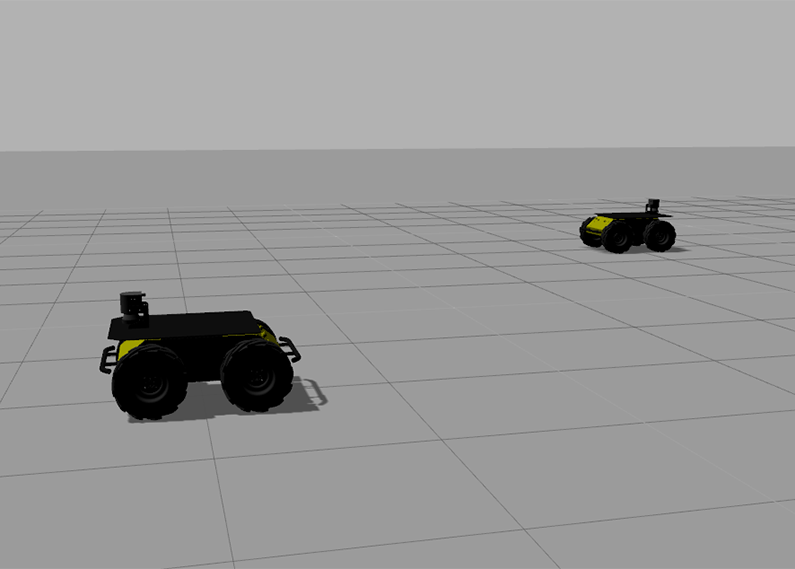
How can I simulate multiple Huskies in a single Gazebo environment? This question pops up from time to time from customers who have adopted multiple Clearpath robots. While there are various options, including the Multimaster FKIE ROS package, many customers seem to...

by Chris Bogdon | Mar 7, 2016 | Robot Forge, Tradeshows & Conferences |
Amir Degani is an assistant professor at Technion Institute of Technology and Avi Kahnani is the CEO and Co-Founder of Israeli robotics start-up Fresh Fruits Robotics (FFR). Together, they presented an apple harvesting robot that will autonomously navigate apple...
by Chris Bogdon | Feb 17, 2016 | Teaching and Learning |
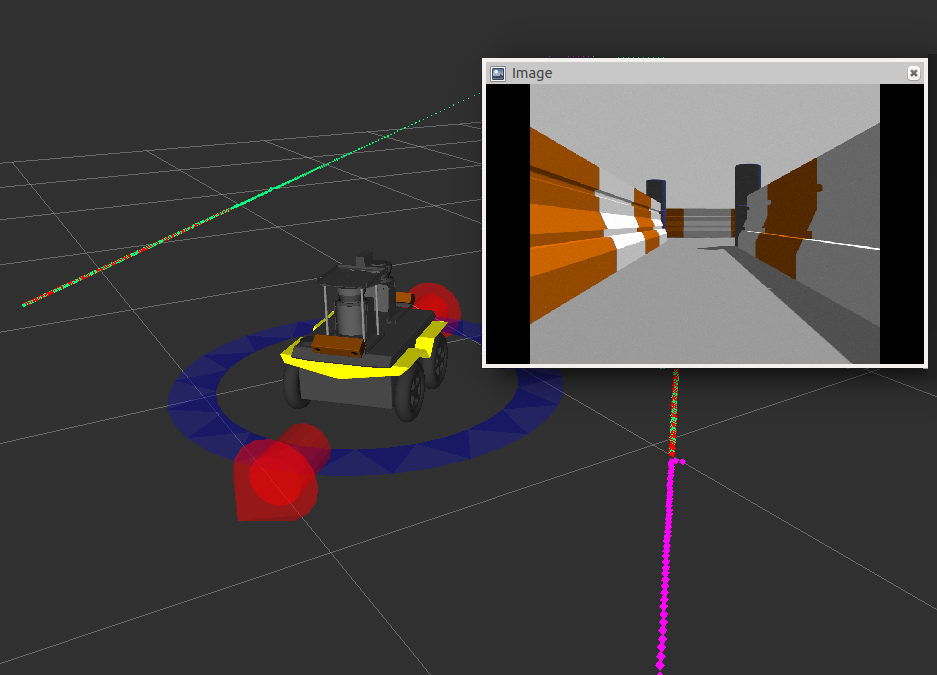
If you’ve worked with ROS and robots, there’s a good chance you’ve heard of gmapping, localization, SLAM, costmaps and paths. But what does all of this mean? They are more than just robot buzz words; they allow a robot to navigate from one point to another...
by Chris Bogdon | Feb 9, 2016 | Robot Forge, ROS Spotlight |
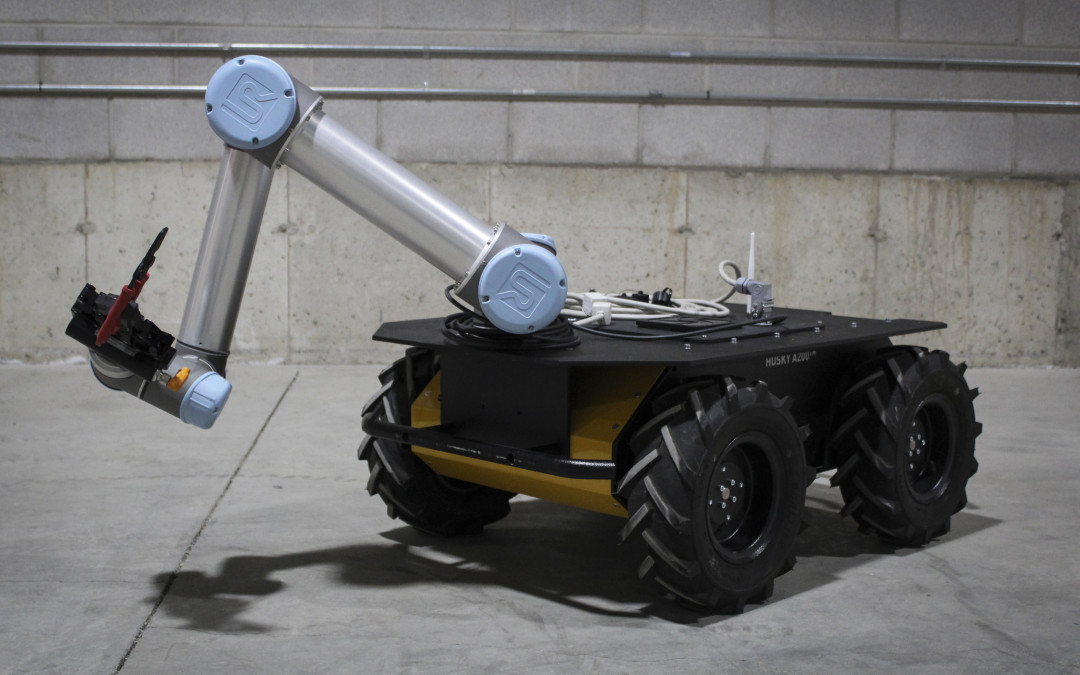
The ROS Spotlight is a new technical blog series that explores the latest developments in the world of ROS by highlighting a new package each month. To kick things off, we will look at the new and improved driver package for Universal Robots’ UR3, UR5 and UR10 robot...

by Rachel Gould | Nov 10, 2015 | In the Field: Customer Spotlight |
We provide some of the world’s top researchers with unmanned vehicles for their R&D initiatives, and the U.S. Army Research Lab (ARL) is no exception! This week, we had a chance to learn how they’re using two Clearpath Huskies to field test vision-based autonomous...
