
3D mapping plays a vital role in industrial applications by providing detailed, spatially accurate representations of physical environments. From construction sites and manufacturing facilities to mines and energy infrastructure; having a clear, three-dimensional view of assets and surroundings enables better planning, monitoring, and decision-making.
However, collecting this data is often challenging. Harsh environments, limited access, GPS-denied areas (such as underground or inside structures), and the need for rapid data collection can hinder traditional surveying methods. These limitations often lead to incomplete data, increased safety risks, and costly delays.
When high-quality 3D mapping data is available, it brings significant benefits: enhanced situational awareness, improved asset management, more precise progress tracking, and increased operational safety. Ultimately, it allows industrial teams to detect issues early, reduce rework, and optimize workflows, saving both time and money.
About Hovermap
Our team got a hold of an Emesent Hovermap sensor for testing on our mobile platforms for just this purpose of 3D mapping in industrial settings. The Emesent Hovermap sensor incorporates the latest in LiDAR sensing technology to offer high density point clouds with exceptional coverage. Featuring a sensing range of up to 300 meters and more than a million points per second, Hovermap captures detailed, accurate data over a wide area fast – accelerating time to insight.

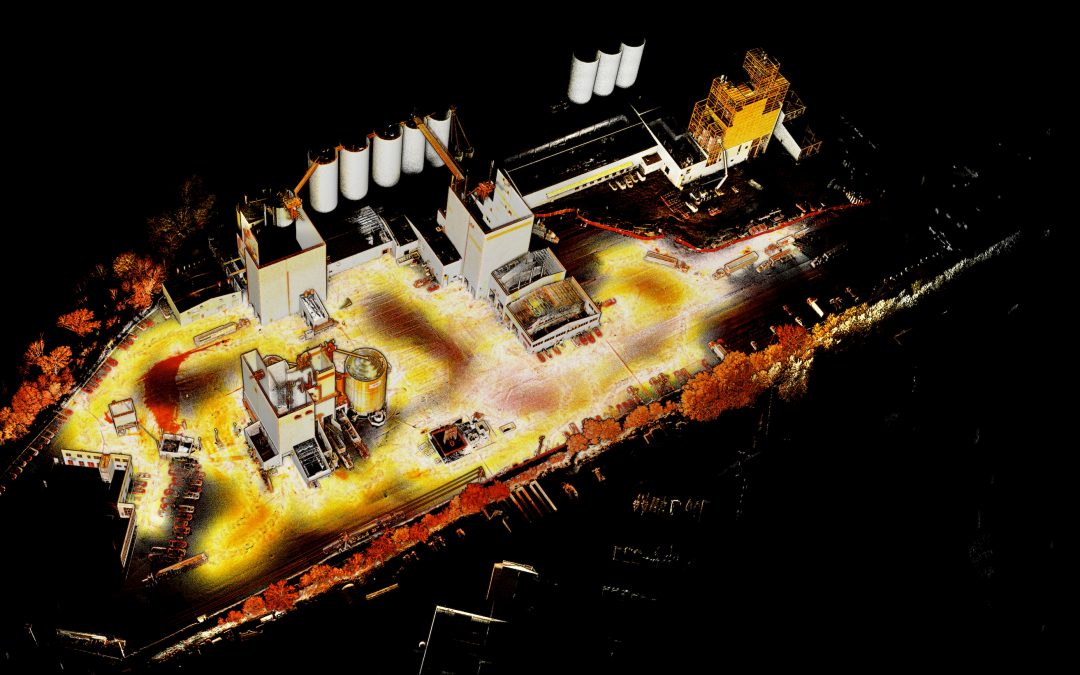
Post processing the Hovermap data is done using Emesent’s Aura software. Aura offers a range of automated filtering tools to clean and refine the pointcloud. In our case, we used features such as Statistical Outlier Removal to eliminate random noise, as well as filters for moving objects and other sources of interference. The workflow was relatively simple and user-friendly on a computer using the recommended hardware specifications. Below, you’ll find screenshots of the resulting 3D map. The entire process, from data collection to map generation, proved accessible and efficient, even for team members without engineering backgrounds.
Deploying Hovermap on a Jackal UGV
To put the Hovermap sensor to the test, we integrated it on a Jackal for a field trip to a local outdoor industrial facility. The unit could also be integrated on our larger platforms — like the Husky A300 — for increased runtime and payload capacity.
Integrating Emesent’s Hovermap LiDAR system onto the Clearpath Jackal UGV was a straightforward process. Because Hovermap is a self-contained unit with its own power supply, sensors, and onboard storage, there was no need to interface it with the Jackal’s internal systems. This made it easy to mount and deploy without any additional setup. In future tests, we would connect the Hovermap directly to the Jackal’s onboard computer to access real-time SLAM data and live point cloud streaming. We also attached a GoPro to record 360° video during the run. This video footage can later be used to colourize the pointcloud data, one of Hovermap’s built-in capabilities.
At the facility, the exercise focused on exploring potential applications of SLAM-based mapping in an industrial setting. Possible use cases include:
- Construction monitoring: Capturing accurate, up-to-date maps of active construction areas for progress tracking and documentation.
- As-built documentation: Creating a precise digital record of complex facilities, both inside and out, to inform future upgrades, retrofits, and expansions.
- Asset and layout management: Maintaining current facility maps for better planning of equipment placement, utilities, and workflow optimization.
- Safety planning: Providing accurate spatial data for emergency response planning or safety audits.
![]()
Mapping the site was fast and unobtrusive. The scans were taken in roughly the same amount of time it took to drive through the facility, rather than setting up a sensor on a tripod. Normal plant operations could continue without disruption, as any moving vehicles present during mapping could be removed during post-processing. The drivers only had to keep an eye out for the small yellow Jackal driving by.
While these applications at the facility were exploratory, they demonstrate how the same technology can translate to other industrial environments such as manufacturing plants, power facilities, or large-scale warehouses. In these settings, high-fidelity 3D mapping enables better planning, reduces downtime during upgrades, and improves operational safety.
These use cases also lay the foundation for creating a digital twin of the facility (a virtual replica that reflects real-world conditions). This may not be critical at this particular facility, but is becoming increasingly important in industries with complex assets, dynamic operations, or high cost of failure such as manufacturing, construction, oil and gas, or mining. By regularly updating the digital twin model, the owners of this data can gain powerful insights that lead to more well informed decision-making.
![]()
Ground vs Aerial Mapping
Using the Hovermap payload on ground vehicles such as the Husky A300 AMP can offer key advantages over drone-based mapping in specific environments. One particularly valuable application is mine rehabilitation, where accurate mapping and safe navigation are essential.

With its Simultaneous Localization and Mapping (SLAM) capabilities, the Hovermap allows ground vehicles to enter and explore unknown or unstable tunnel networks, while creating a map in GNSS-restricted environments. This can be done autonomously, semi-autonomously, or through teleoperation, enabling teams to assess the condition and safety of the mine without putting personnel at risk.
While drones are highly effective in many mapping situations, confined underground environments pose unique challenges. In these settings, drones can stir up significant amounts of dust, which interferes with LiDAR performance and makes it difficult to maintain visual or sensor-based awareness. Ground vehicles do not have this issue, as their movement generates far less environmental disturbance.
Some key advantages of ground-based platforms include:
- Ability to travel longer distances due to increased runtime, especially in larger environments like this where charging is impossible. The Husky A300 AMP offers up to 18 hours of continuous operation with its largest battery configuration.
- Higher payload capacity, allowing more sensors and equipment to be integrated. Do more with one robot for a greater return on your investment.
- Greater onboard power, supporting energy-intensive accessories such as high-bandwidth networking gear or multiple cameras.
Although drones remain a strong option for aerial mapping tasks, ground-based SLAM vehicles provide a complementary solution that can be more practical and reliable in complex or enclosed environments like mines.
The Future of 3D Mapping on Ground Robots
3D mapping sensors, particularly integrated on ground robots, are proving invaluable across a wide range of industrial applications. Their ability to deliver high-resolution, close-range spatial data makes them ideal for tasks like mapping and monitoring, where precision and obstacle avoidance are critical. While aerial mapping has its advantages in large-scale surveying, ground-based mapping is often the better fit for structured, confined, or dynamic industrial environments. As industries continue to automate, ground-based 3D mapping plays a key role in enabling smarter, more efficient operations.
Hovermap is now available on custom integrations on Clearpath outdoor platforms. Contact us for more information or request a quote for a Husky A300 in this configuration.