

Mobile manipulator robots are becoming increasingly prevalent as sensors, robotic arms, and mobile platforms become more accessible. These robots usually consist of a mobile base, like the Ridgeback omnidirectional platform, paired with one or two robotic arms and a sensor suite to support a specific application. Ultimately, these human-like robots are helping advance fields like warehouse automation and service robotics, and human-robot collaboration in industries like healthcare and manufacturing.
When mounting arms onto an autonomous mobile base, a fixed arm height is oftentimes good enough. But with the growing interest in humanoid robotics, researchers and robot developers are starting to seek more flexibility and adaptability in arm control and positioning. That’s where the Ewellix telescopic lifting columns come in.

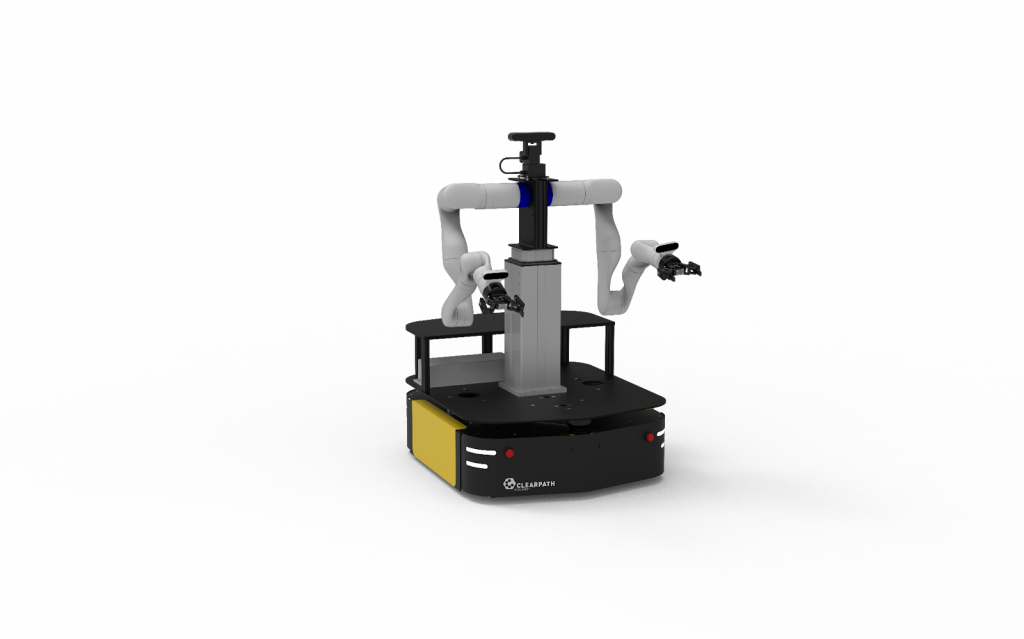
Dual Franka Research 3 Arms mounted on a Ewellix lift column on a Ridgeback omnidirectional platform
Ewellix telescopic lifts bring surgical-grade precision, strength, and safety to robotics. Originally designed to adjust medical equipment and patients, supporting loads of up to 600 pounds, these lifts help surgeons work more comfortably. When used as the base of a robotic arm, the lifts adds extra flexibility, giving the robot greater reach and maneuverability. It can even be used as a base for sensors, allowing their position to be adjusted programmatically.
This increased flexibility, combined with medical-grade safety and reliability, makes the Ewellix telescopic lifting columns a smart, off-the-shelf upgrade for mobile manipulator robots.
Key Features
Let’s take a closer look at some of the key features of the Ewellix pillars related to safety, performance and software integration.
Safety and Protection
The control unit complies with the IEC 60601-1 standard for medical applications, can be incorporated into a robot’s emergency e-stop loop, and has overload over-temperature protection.
Various Heights and Stroke Length
The Ewellix line of lifting columns has five different heights and lengths to choose from. The pillars are available with the following stroke lengths: 300, 400, 500, 600, 700 mm.
Load and Speed
There are also five different push load and speed profiles to choose from depending on the payload:
- A1: 3000N, 11 to 16 mm/s
- A2: 4000N, 13 to 19 mm/s
- B1: 2000N, 13 to 19 mm/s
- C1: 1000N, 25 to 36 mm/s
- C2: 2000N, 25 to 42 mm/s
External Control
While each lift contains 2 actuators, the Ewellix SCU control unit features a serial RS232 interface to control 6 possible actuators (for a total of three lifts). Utilizing this interface, the current state and error feedback from each actuator can be retrieved.
ROS Integration
To facilitate software development with the Ewellix TLT pillar, Clearpath Robotics provides open source ROS libraries, nodes, and plugins.
- ROS 1 Noetic
A few years ago, we extended an existing open source driver written by our partners at Generation Robotics to include MoveIt! support by implementing a Joint Trajectory Action server. You can find our modified driver on the public Clearpath Robotics GitHub repository.
- ROS 2 Humble and Jazzy
As we migrated to ROS 2, we re-imagined the entire driver to facilitate further development and customizability. The ROS 2 Ewellix driver is open source, and can be freely used and modified. - Ewellix Serial Library
At its core, the driver contains a C++ library that exposes all serial communication to interact directly with the lift. The library can be used to build a custom ROS 2 node, and we provide an example node for developers to get started with. - Ewellix Hardware Interface
In ROS 2, it has become standard for all controllers to be implemented utilizing the ros2_control framework. To that end, we implemented a Hardware Interface plugin that exposes the position command interface of the lift to allow using Position Controllers and Joint Trajectory Controllers. - Ewellix Sample Simulation
Furthermore, we have set up a sample Gazebo simulation to get started with the lift. To try it out yourself, follow the instructions in the repository.
Example Mobile Manipulator Configurations
Dual-Arm Kinova Gen3 Mobile Manipulator
In the past, we highlighted a robot lab assistant that was composed of a Clearpath Ridgeback mobile base, an Ewellix TLT 1500N, 500 mm stroke pillar, and dual Kinova Gen3 collaborative arms with Robotiq 2F 85 grippers. The robot was additionally equipped with depth cameras on the arm’s wrists, a Stereolabs Zed 2 camera, and an Ouster OS1 LiDAR. To read more about this robot, visit our blog post Exploring Human Robot Interaction: Ridgeback Optimizes Lab Operations.
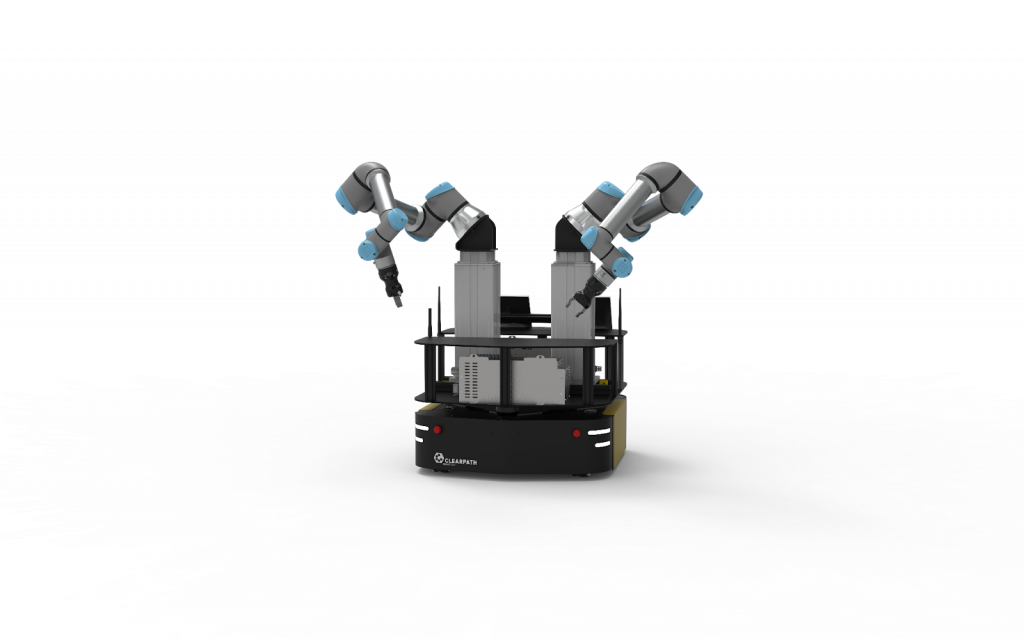
Dual UR5e Mobile Manipulator
The Ridgeback mobile platform supports a variety of different arms and configurations. The configuration below includes two UR5e manipulators, each with a dedicated lift that allows for complete independent control of the height positioning for each arm.
Conclusion
As mobile manipulation continues to evolve, the ability to dynamically adjust an arm’s height is becoming a critical factor in expanding its capabilities. By integrating Ewellix lifting columns, mobile manipulator robots gain an added degree of flexibility, enabling them to interact with their environments more effectively—whether for precise industrial tasks, collaborative workspaces, or advanced research applications. With robust safety features, customizable configurations, and seamless ROS integration, the Ewellix lift system provides a reliable and off-the-shelf solution for enhancing mobile robotics.
Learn More
Looking to enhance your mobile manipulator with greater flexibility and precision? Contact our team to learn more about Ewellix lifting columns and explore the best solution for your next robotics project. Click here to learn more about the Ridgeback omnidirectional mobile platform.