

Clearpath is proud to partner with our friends at Universal Robotics to integrate UR5 and UR10 with the Husky and Grizzly, respectively, to make the ultimate mobile robot configurations! This is the first of many mobile robot configurations to be released, so stay tuned for more! In the meantime, read on to learn about the rugged opportunities that that the UR5 and UR10 mobile manipulation systems present.
Mobile manipulation made for field testing
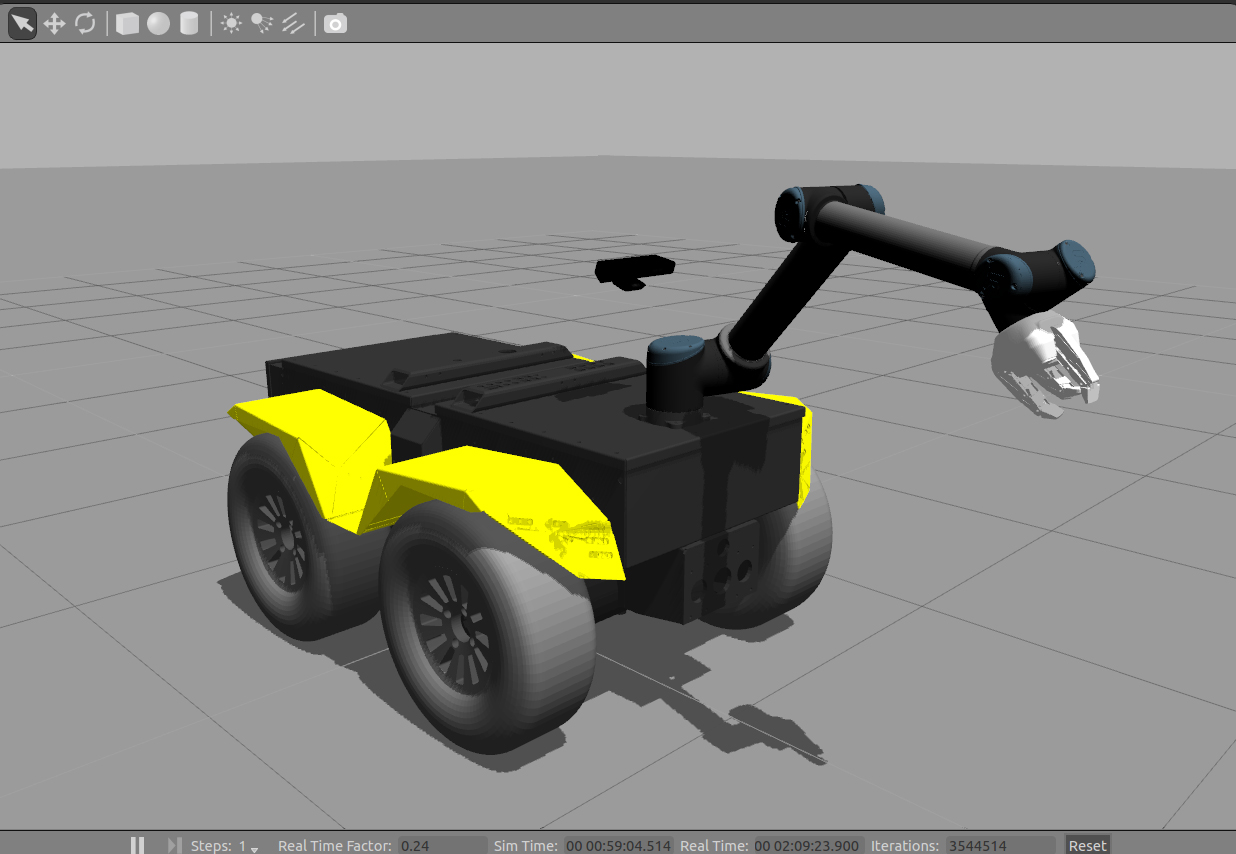
The Grizzly Manipulation System in action in Gazebo.
We sat down with our open source guru, Devon, and General Manager of Research Products, Julian, to learn how these rugged mobile manipulators will make a dent in the research world – and ultimately industry. “Simply put, this will enable the Grizzly and Husky to grab things with an arm” said Devon. “The arm will be able to plan around obstacles, work with the sensors on the robot, see things in the environment (determine them as obstacles), and avoid them just as you would with our other platforms avoiding things in 3D space along with a lot more.”
Okay, so you know what it can do, but how does it do it? It’s no surprise that ROS has a little something to do with that! ROS has been fully integrated into the UR5 and UR10 manipulators arms. “The integration includes things like RVIZ and Gazebo, and all the sensor suites that Gazebo provides,” explained Devon. “It has the interfaces if you want to program and you can even use it with the existing software that Grizzly already has, like tele-operation and the autonomous navigation – it puts it all together to offer state of the art.”
UR5 and UR10 provide all-terrain mobile manipulation
Including the fact that UR10 can beat Jimmy Fallon in a game of beer pong, these manipulators have a lot to offer!
Grizzly was the Robotics Business Review (RBR) winner in the Industrial Productivity category for 2013 (we were thrilled!). In that same year, believe it or not, the UR5 was a winner of the Human Machine Interaction Award for RBR. One of the reasons why our configuration packages are so robust is because sitting on top of our award-winning robot (literally), is another award-winning and academically recognized manipulator platform.
“UR5 and UR10 are rugged industrial manipulators that can go outside in a light rain and handle wear and tear; they’re high-end manipulators,” said Julian. “To use other proficient industrial arms, you have to access closed (rather than open) company API code and sometimes it’s just impossible, or at the very least frustrating, to use. Clearpath offers a complete mobile manipulation package that’s ready to use in a ROS environment. It’s going to be faster and easier to get this doing real mobile manipulation applications then it would be to integrate your own arm or to buy a competing package.”
These configurations are ready to make an impact

Here’s the UR5 extending to show its range of motion while attached to the Husky.
With applications such as motion control research (position, planning, kinematics…), vision based motion planning, human robot interaction and tele-robotics, there’s a bright future ahead for these mobile manipulation configurations. “We’re really excited to see what people end up doing with the UR5 and UR10 configuration packages. All of the research happening with mobile manipulation is very application-orientation and less theoretical. It’s not just a platform, it’s a platform that’s doing something and really making an impact.” said Julian.
One of our first customers to jump onboard of this brand new configuration package is world renowned roboticist Paul Newman from Oxford University. We can’t wait for more researchers to get a hold of these robots and see what can be accomplished with a little bit of elbow grease from the UR5 and UR10 arms.
For more information about the new UR5 and UR10 configurations visit us online. Or email us at in**@cl***************.com if you have ideas for a configuration package specific to your research.
Trackbacks/Pingbacks