

The DARPA Robotics Challenge is coming up fast and we’ll be there to give you the scoop! Track A Teams had a 15 month timeline (Oct 2012 Kickoff to Dec 2013 DRC Trials) to design and build their bots. Each team has taken different approaches to grind through the compressed timeline and work as efficiently and effectively as possible. Meet the Track A teams and stay tuned as we follow their adventure at DRC Dec 20-21, 2013 in Homestead, Florida.
Drexel University – DRC-Hubo

Drexel U’s DRC Hubo
Standing in the corner at 4.6 feet and weighing in at 132 pounds is Drexel University’s DRC-Hubo. With efficiency and innovation top-of-mind, each member on the team was equipped with a stock Hubo to catalyze a multi-university effort to target the anticipated DRC challenge.
In total, seven Hubo humanoids (acquired from previous NSF grants) along with an open-source simulator (OpenHubo) were distributed to partners. Each partner was responsible for tackling one event that would occur at DRC. This quick divide of events and resources enabled rapid-prototyping of algorithms and test-and-evaluate limitations of the current Hubo. It also eliminated a need to ‘hack’ together software or additional hardware elements.
Following their effort toward a “program-test-perfect” model, Drexel University broke the time frame down into phases, where phase 1 was used to distribute resources, phase 2 involved testing, phase 3 evaluated computer models and beta tested DRC-Hubo, and phase 4 served as validation. Can’t wait to see the fruits of your labor!
NASA Jet Propulsion Labs – RoboSimian

NASA JPL’s RoboSimian
NASA rarely disappoints, so we’ve got big expectations for this four-limbed bot. This experienced team was going for modularity, dexterity and fieldability, and dare we say, it looks like they’ve done it. RoboSimian has system elements, software algorithms and design methods that will use deliberate and stable operations to complete challenging tasks via teleoperation.
What’s different about RoboSimian is that it has four general-purpose limbs and hands that can be used for mobility and manipulation. At first glance, they appear to be simple pieces, but since this is a hard-core robotics challenge, we knew that wasn’t the case! With 28 degrees of freedom throughout this bot, RoboSimian is capable of advanced manipulation and can perform multi-point anchored connections to support ladders, railings, and stair treads, and it can easily brace itself when it encounters forceful manipulation.
Software and hardware for this bot were developed in parallel. Since the software division had to work with something, they were provided with a “mule” of as much of the robot as possible at any one time. Again they seem to have done things out of the box here since most of the other candidates seem to use simulation techniques for parallel development.
SCHAFT Inc. – HRP-2 based biped
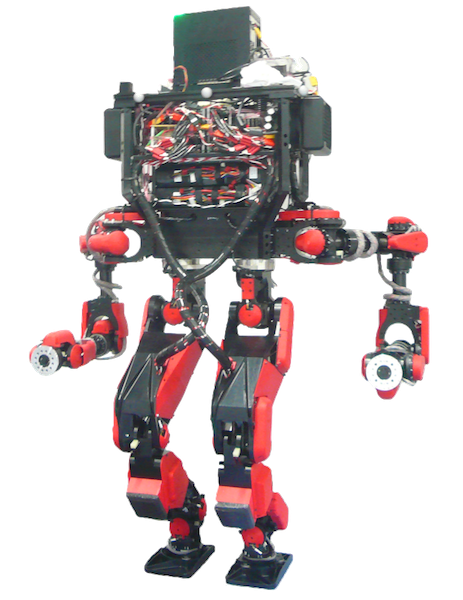
Schaft Inc’s HRP 2
SCHAFT Inc. is on a mission to develop a powerful actuator system with robust walking and stabilization. In other words they’ve created HRP-2, a bipedal robot built on the foundation of their existing hardware and software designed.
HRP-2 stands about 5 feet tall and weighs in at 209 pounds. This red and black bot is designed with a combination of recognition, planning, motion generation, motion control and user interface modules to align with the anticipated DRC events. For optimal results in a compressed timeframe, SCHAFT Inc. divided their team into hardware design, software integration and scenario testing groups.