As populations age and the demand for care continues to grow, researchers are exploring how robots can help seniors maintain their independence while supporting overburdened healthcare systems. At the Munich Institute of Robotics and Machine Intelligence (MIRMI) at... read more
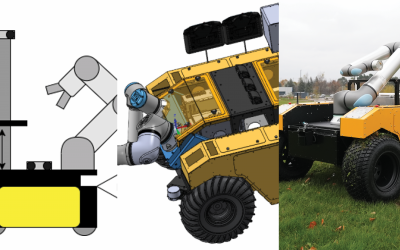
A rugged mobile manipulator built on the Warthog mobile base, featuring a Universal Robots UR20 arm offering an impressive 1.7m reach and 25kg payload capacity. This ROS-based custom integration, with the customers’ additional sensors and gripper, is designed... read more
The world’s top robotics minds are gathering at ICRA 2026 in Vienna, Austria in June, and we’re proud to see Clearpath robots helping drive the research conversation. From novel applications in autonomous navigation to advancements in human-robot interaction,... read more
This custom Husky A300 is set up for advanced mobile manipulation research, combining a robust mobile base with a Universal Robots UR5e arm. The system includes a touch screen mount for intuitive interaction and a fully integrated enclosure that protects the control... read more
Before you can test drive your shiny new robot and move it to its new home, you’re going to need to connect it to the Bluetooth controller. If you’re wanting more detailed instructions than the user manual, or need to do some troubleshooting, this blog will walk you... read more
After more than 15 years in the industry, Clearpath Robotics is well known for our black and yellow mobile robots. With various form factors for different terrains, these platforms continue to be the ideal starting point for conducting research and automating... read more
Robotics research often moves from simulations to real-world testing, and when that happens researchers need dependable platforms they can build on. Clearpath Robotics robots frequently show up in academic projects for exactly this reason—they’re rugged, flexible, and... read more
Industrial automation increasingly requires systems that can operate beyond paved roads and controlled facilities. From remote mine sites and agricultural fields to wetlands and winter test grounds, teams need mobile platforms that combine durability, payload... read more
Getting your robot up and running isn’t just about powering it on—it’s about connecting it to a larger ecosystem. Our robotic platforms rely on wireless communication protocols to enable remote access to the onboard ROS environment, making development, monitoring, and... read more