by Chris Bogdon | Mar 30, 2016 | Robot Forge, ROS Spotlight |
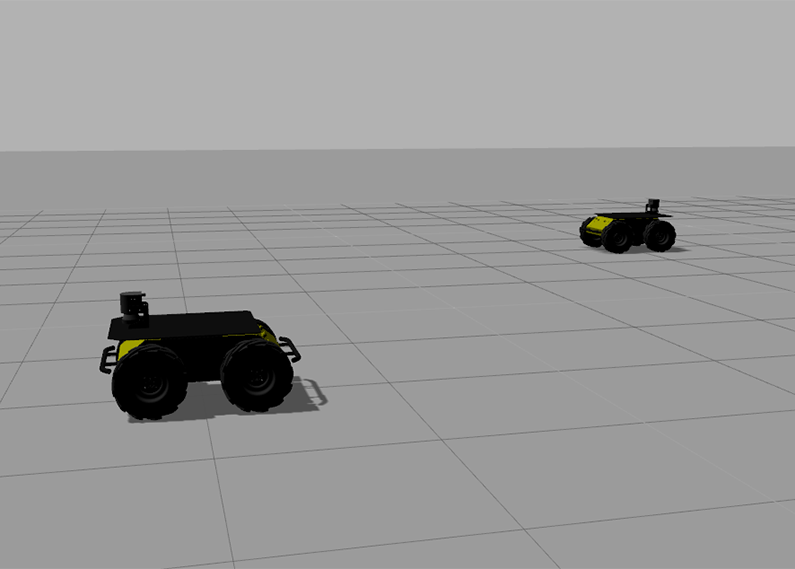
How can I simulate multiple Huskies in a single Gazebo environment? This question pops up from time to time from customers who have adopted multiple Clearpath robots. While there are various options, including the Multimaster FKIE ROS package, many customers seem to...
by Chris Bogdon | Feb 17, 2016 | Teaching and Learning |
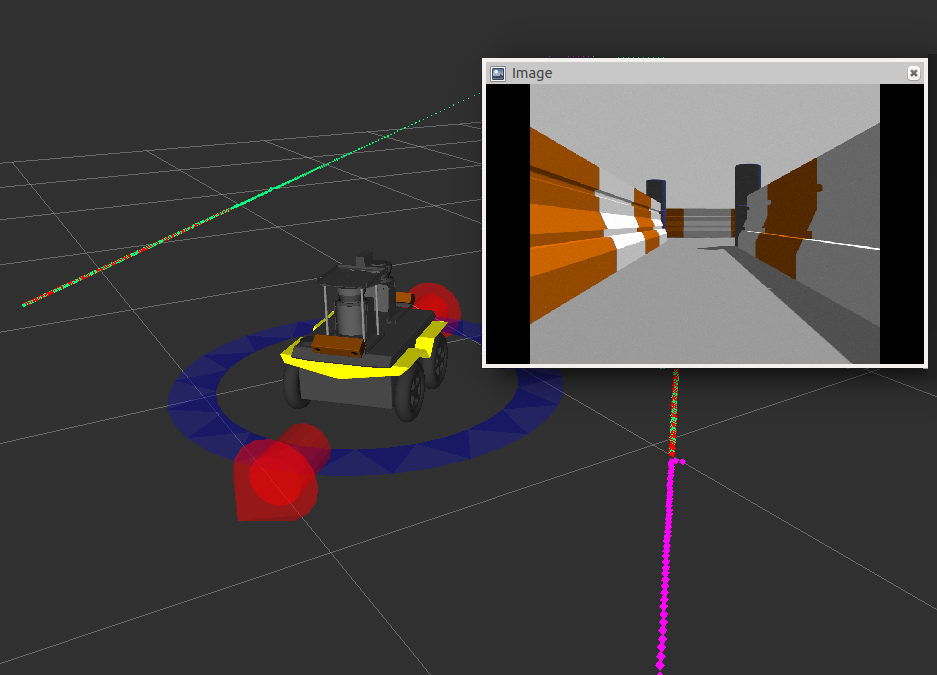
If you’ve worked with ROS and robots, there’s a good chance you’ve heard of gmapping, localization, SLAM, costmaps and paths. But what does all of this mean? They are more than just robot buzz words; they allow a robot to navigate from one point to another...
by Chris Bogdon | Feb 9, 2016 | Robot Forge, ROS Spotlight |
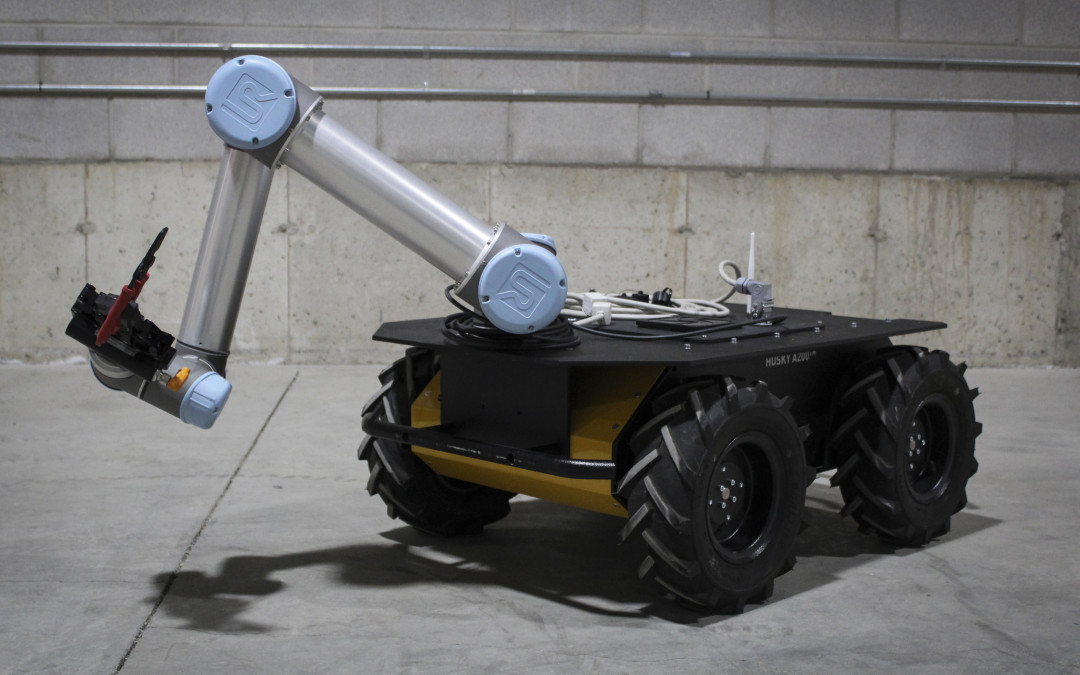
The ROS Spotlight is a new technical blog series that explores the latest developments in the world of ROS by highlighting a new package each month. To kick things off, we will look at the new and improved driver package for Universal Robots’ UR3, UR5 and UR10 robot...

by Ilia Baranov | Mar 26, 2015 | Robot Forge |
Recently, Mathworks released a new toolbox for Matlab. This is exciting for a number of reasons: it includes everything from data analysis to coordination of multiple robots. In today’s post, we explore using this Robotics System Toolbox to connect to both real...

by Ilia Baranov | Mar 16, 2015 | Teaching and Learning |
Enabling the Kinect V2 for PR2 has been a little tricky. The very high bandwidth of the sensor (almost fully saturating USB 3.0) combined with the high frame-rate of the sensor means that a dedicated computer is usually needed for data processing. Luckily the PR2 team...
