
If you’ve worked with ROS and robots, there’s a good chance you’ve heard of gmapping, localization, SLAM, costmaps and paths. But what does all of this mean? They are more than just robot buzz words; they allow a robot to navigate from one point to another without bumping into obstacles. In our latest ROS 101 tutorial – ROS Navigation Basics – we’ll cover some of the key concepts in what makes up an autonomous robot, and walk you through a simulated example using Gazebo and Rviz.
The ROS 101: ROS Navigation Basics tutorial will show you how to:
- Install ROS simulation, desktop and navigation packages
- Launch a robot simulation in Gazebo
- Build a map of a simulated world using gmapping
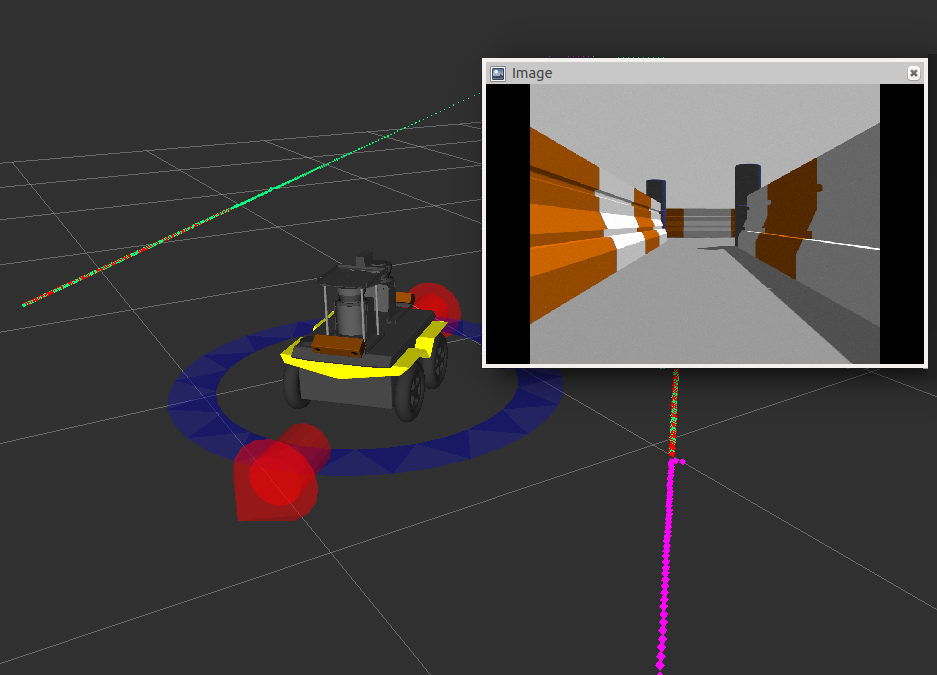
- Visualize costmaps in Rviz
- Localize a robot using the AMCL localization package
- Simulate a fully-loaded Jackal UGV and view sensor inputs using Rviz
Click here to view the tutorial, along with all of our previous ROS 101 tutorials. If you are new to ROS, it may be best to start your journey at the beginning with ROS 101: Getting Started With Ubuntu. For more tutorials, be sure to check out our Support Knowledge Base where you will find step-by-step guides for all Clearpath robots, as well as ROS, PR2 and Turtlebot.
Have a good topic for our next tutorial? Please let us know in the comments!
