

With over 3000 employees around the world, MathWorks is the leading developer of mathematical computing software. In 2015, the company launched the Robotic System Toolbox, a new toolbox for MATLAB that provides algorithms and hardware connectivity for developing autonomous mobile robotics applications. The robotics systems toolbox team uses Jackal UGV regularly as a testing platform to evaluate how algorithms perform and understand ROS insights in a more realistic environment.
In recent years, ROS has gained in popularity and is becoming a key platform for the robotics community. However, many researchers do not yet know how to use it, according to MathWorks’ market research. This observation is what inspired the creation of the Robotic System Toolbox for MATLAB. “Before we created a solution, most users had to use ROS on Linux-based Ubuntu,” explains Pillat, Senior Software Engineer at Mathworks. “Although ROS is fairly painless, there are a lot of researchers who either aren’t comfortable with ROS or work in labs that only provide Windows computers.”
Testing in virtual and physical environments
The Robotic Systems Toolbox offers various algorithms including map representation, path planning, path following for differential drive, and mapping and localization. Before testing on a physical platform, Pillat’s team tested their work in a simulated environment using Gazebo. “I have a virtual machine with the Jackal simulator running all the time. Once I’m ready to test on a real robot, I can immediately dispatch the same algorithm onto the robot”, says Pillat. “The fact that Clearpath provides a simulator for Jackal and Husky helps a lot with our development.”
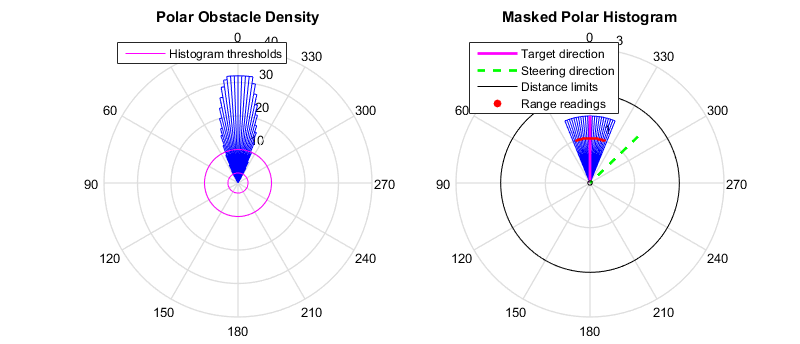
MathWorks used Jackal to extensively test the new Vector Field Histogram algorithm – an algorithm that allows your robot to avoid obstacles based on range sensor data.
The Jackal was equipped with a Kinect vision sensor for collecting mapping data. As the Jackal drove around, odemetry data was collected and then stitched together with the point cloud data from the Kinect to produce a representative map of the robot’s environment. The odemetry data was delivered wirelessly from the Jackal directly from the odometry ROS topic. “It was quick for us to get started and collect data. It wasn’t complicated at all. This really helped our computer vision team, because they’re not roboticists and don’t always understand how to solve these processes.” says Pillat.

A simulated Jackal UGV in the Gazebo robot simulator.
Beyond the robotics lab
The team continues to use the Jackal to further develop and add new features to the Robotic System Toolbox. Their Jackal has traveled with them to various conferences and events including the International Robotics Conference on Robotics and Automation in 2015, where they gave live demonstrations of their new algorithms. “Clearpath represents the gold standard in mobile robots,” says Pillat. “The fact that Jackal is recognized in the robotics community, and we can prove that our solutions work with it, gives us credibility.”
The Robotic Systems Toolbox can be used with any of Clearpath’s robots. Check out our previous blog post to see a video tutorial on running an obstacle avoidance sample on a physical and simulated Jackal.