
by Chris Bogdon | Jan 5, 2017 | In the Field: Customer Spotlight |
Sriram Narasimhan’s research team is shaking things up in the Civil Engineering Structures Lab at the University of Waterloo. The research, which is led by Ph.D Candidate Kevin Goorts, is developing a new mobile damping system for suppressing unwanted vibrations in...

by Chris Bogdon | May 9, 2016 | ROS Spotlight, Teaching and Learning |
A light-weight 3D camera with ROS integration The RealSense R200 camera is a new 3D camera from Intel that packs three cameras – two IR cameras (left and right) and one RGB camera – into a small, light-weight form factor. With its relative low cost, high...
by Chris Bogdon | Feb 17, 2016 | Teaching and Learning |
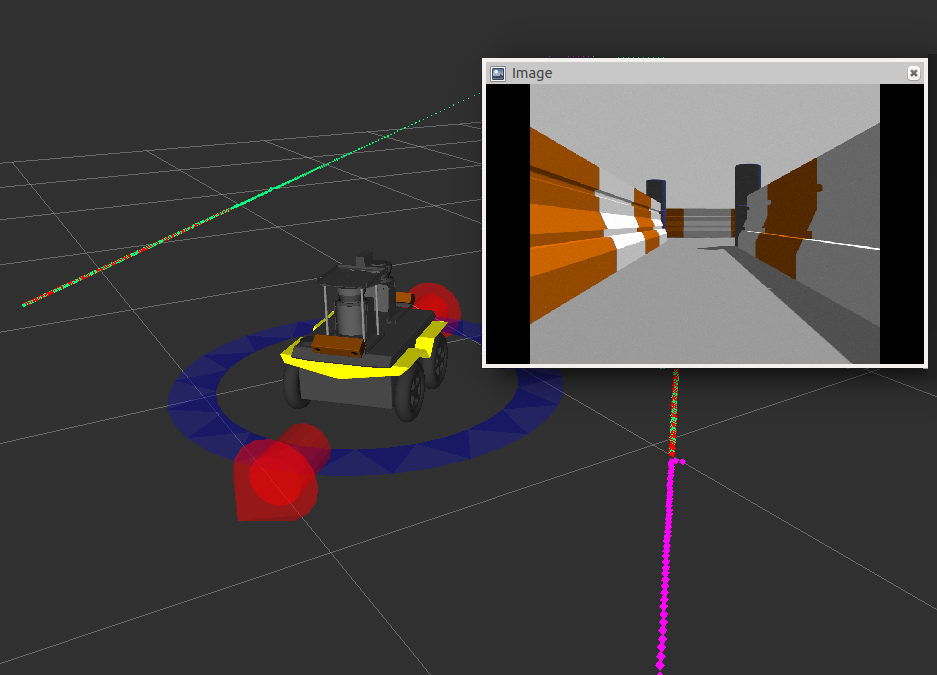
If you’ve worked with ROS and robots, there’s a good chance you’ve heard of gmapping, localization, SLAM, costmaps and paths. But what does all of this mean? They are more than just robot buzz words; they allow a robot to navigate from one point to another...

by Martin Cote | Dec 11, 2014 | Teaching and Learning |
We previously learned how to write a publisher node to move Husky randomly. BUT! What good is publishing all these messages if no one is there to read it? In this tutorial we’ll write a subscriber that reads Husky’s position from the odom topic, and graph...

by Martin Cote | Oct 30, 2014 | Teaching and Learning |
Whether you have a Jackal UGV or not, the Jackal simulator is a great way to get started with ROS robot development. In this tutorial, we will go through the basics of starting Gazebo and Rviz and how to drive your Jackal around. If you are new to ROS, it’s...
