
HUSKY PERFORMS SLAM ON STEREONETS TO HELP PREDICT ROCK FALLS AND ROCK BURSTS
QUEEN’S UNIVERSITY


The world-renowned Mining Systems Laboratory (MSL) at Queen’s University is known for developing autonomous solutions for applications in mining and geology. Clearpath has previously worked with the MSL on an autonomous retrofit for commercial mining equipment, and is now involved in “Simultaneous Localization and Mapping (SLAM) on Stereonets”, a project run by Assistant Professor Joshua Marshall.
Marshall and his team use Husky Unmanned Ground Vehicle (UGV) to perform geotechnical mapping of rock masses, which is a crucial step in predicting potentially lethal rock falls and rock bursts in and around mines. The MSL’s Husky performs much of the data collection for geologists and geotechnical engineers, automating work that would traditionally take hours to complete manually.
RISKS OF MANUALLY MEASURING ROCKFACES AND DEEP MINES
When it comes to rock faces overlooking highways, or deep inside mines, it is vital that researchers accurately predict lethal geological events. Despite this importance, the traditional method of geotechnical mapping is surprisingly inefficient. A small hand tool must be placed on the rockface to gather data that is then recorded by hand, a process that is repeated hundreds of times. From the data, the researcher can then predict dangerous rock pressures using stereonets: 2-dimensional maps that chart the dominant directions of elements in the rock face.
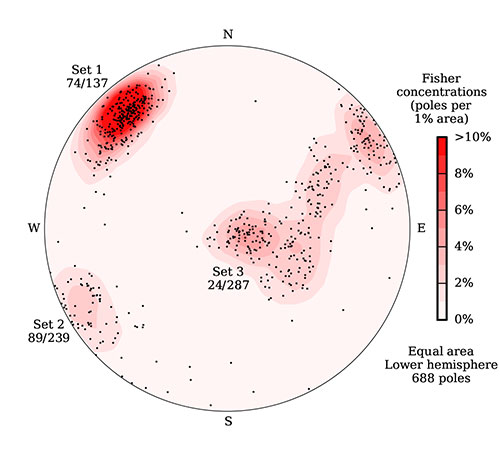
A stereonet describing joint sets in a rock face. This data was collected in just 2 minutes using Husky, but it would have taken hours using traditional hand tools.
In addition to being a monotonous process, these types of manual readings are limited to accessible rockfaces. For instance, an underground mine may experience high temperatures uncomfortable for humans, or the area could be at risk of a ground failure. Extreme events, like rock bursts, can occur when areas with joints or faults in the rock undergo high ground stresses. When there is the risk of a rock burst exploding outwards, or other ground failure, the traditional method of collecting geotechnical information may be unsafe for humans. PhD student Marc Gallant explains, “we need our hardware to be robust in those environments. If a ground failure does occur, we’ll have a broken robot but living people.”
SLAM ON STEREONETS USING MOBILE ROBOTS
The traditional method of SLAM involves taking a 3D map and localizing the robot simultaneously. The MSL’s Husky performs SLAM on stereonets, which enables the robot to autonomously chart the location and direction of joint planes in the rockface. Robot Operating System (ROS) is native to Husky, so it was easy for Gallant and the team to integrate the sensors needed for their research. Their Husky is outfitted with LIDAR and inertial measurement sensors (including magnetometers, gyroscopes and accelerometers), which allow the platform to easily drive alongside the rockface.

The MSL’s Husky at the 2015 NCFRN field trials.
“We just turn Husky on, and the robot drives in a straight line against the rockface without any person needing to be near or in contact with it,” Gallant says. He was recently asked by geologists to deploy a robot for work in Northern Canada, where there are large and inaccessible rock surfaces that are too dangerous for human researchers.
Gallant says that geologists worldwide are excited by the prospect of collecting more accurate readings using the Husky platform. When measuring manually, “two different operators frequently receive different readings, even when measuring the same rockface,” says Gallant. The MSL’s solution is far more comprehensive and reliable. “I’ve had people with no training learn to take these readings robotically in three minutes,” Gallant said. “Previously, it would have taken hours.”
RECOGNITION AND AWARDS FOR SLAM ON STEREONETS
Gallant received the prestigious NSERC Alexander Graham Bell Scholarship specifically for the project, and a simplified version of the team’s algorithm was accepted to the IEEE Transactions on Robotics journal. The MSL is on track to receive widespread recognition for their work on SLAM on Stereonets, and expects to be published in several more journals spanning topics on robotics and geology.
Request a quote for Husky UGV.
| “We needed a robot that could survive rugged terrain, and the Husky has a proven track record in outdoor experiments.” |
Get In Touch With Sales
We build the world’s best unmanned vehicles for industry and research.
Learn how we can integrate the perfect solution to fit your needs.