Introduction¶
Summary¶
OutdoorNav Software is a software package developed by Clearpath Robotics for autonomous and manual navigation of Unmanned Ground Vehicles (UGVs) in outdoor environments.
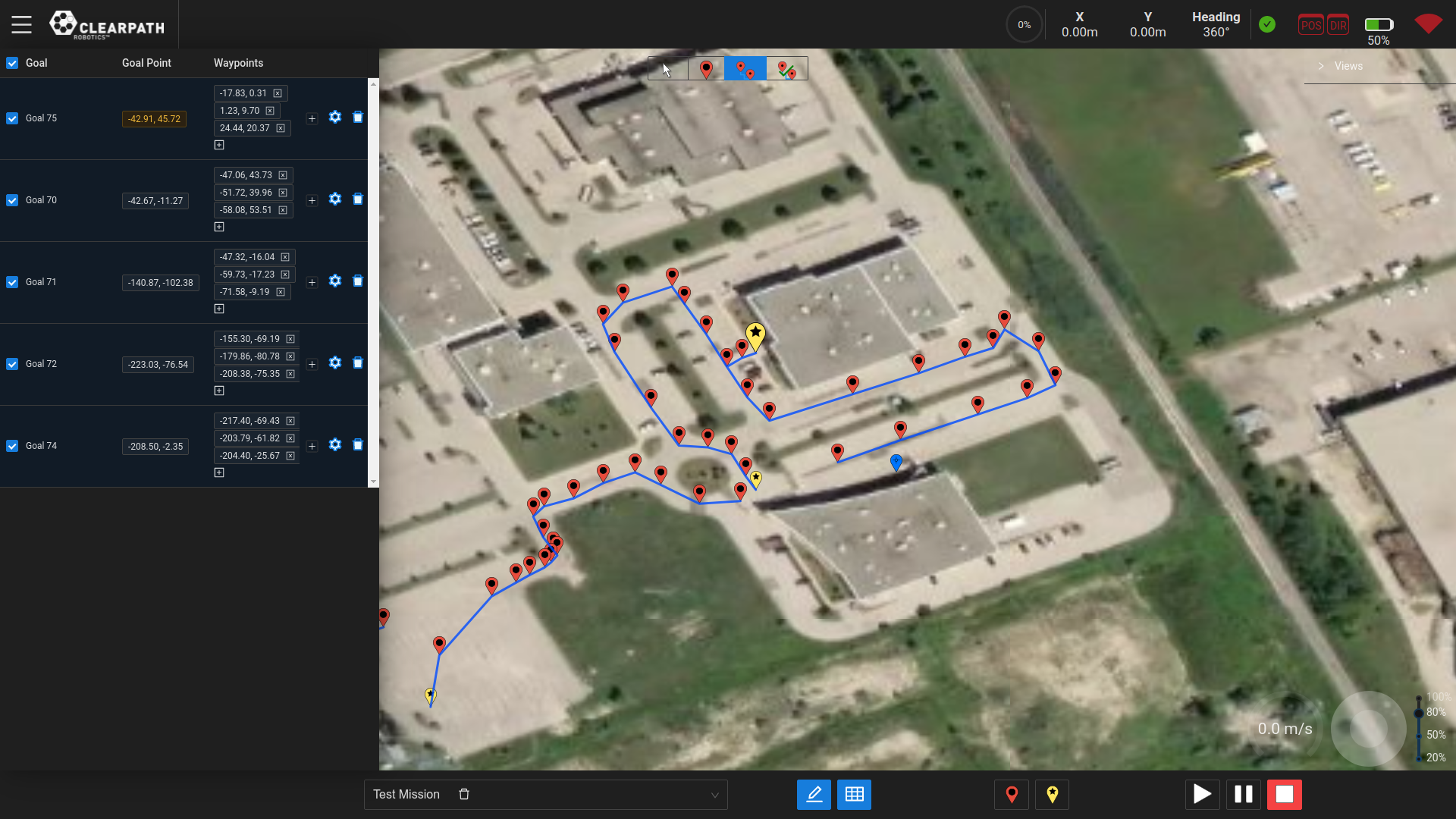
Web UI Mission Planning View¶

Web UI Front Camera View¶
Compatible Platforms¶
While it has been optimized for use with OutdoorNav Hardware from Clearpath Robotics (Husky, Jackal, and Warthog), it has been designed so that it can be added easily to third-party UGVs.

Clearpath Robotics Warthog UGV with navigation equipment and operator control unit¶
Key Features¶
Key features of OutdoorNav Software include:
Mission Planning and Autonomous Navigation
Robust GPS-based localization with sensor fusion of IMU, LiDAR and platform odometry
Autonomous path following via waypoints
Obstacle Detection and Avoidance: Stop and wait or autonomously plan a collision-free path around obstacles without the need to stop
Teleoperation
Operate the robot remotely using an on-screen or physical joystick
Visualize what the robot sees by displaying its network cameras and LiDAR data
Web User Interface (Web UI)
Build missions containing sets of paths, with optional task execution on each path; tasks can be standard tasks (eg. save camera image) or user provided functions
View the robot’s live position and attitude on the map
Display robot data such as velocity, signal strength, status of the E-Stop, status of navigation system, and battery charge
Save and export Missions
Application Programming Interface (API)
Build your own application and UI by accessing the navigation API to control the UGV through software or implement fleet management by accessing the mission API
Simulation
Begin development of your application prior to purchasing licenses or commissioning hardware with OutdoorNav software and the ROS Gazebo simulator
Third Party Integration
The Web UI and API can be accessed through a network connection; cloud-based services are available from third parties to facilitate remote connections and networking to robot hardware such as Formant.io and Freedom Robotics