dingo_description Package¶
The jackal_description package is the URDF robot description for Dingo
Overview¶
This package provides a URDF model of Dingo. For an example launchfile to use in visualizing this model, see dingo_viz.
Mounting Points¶
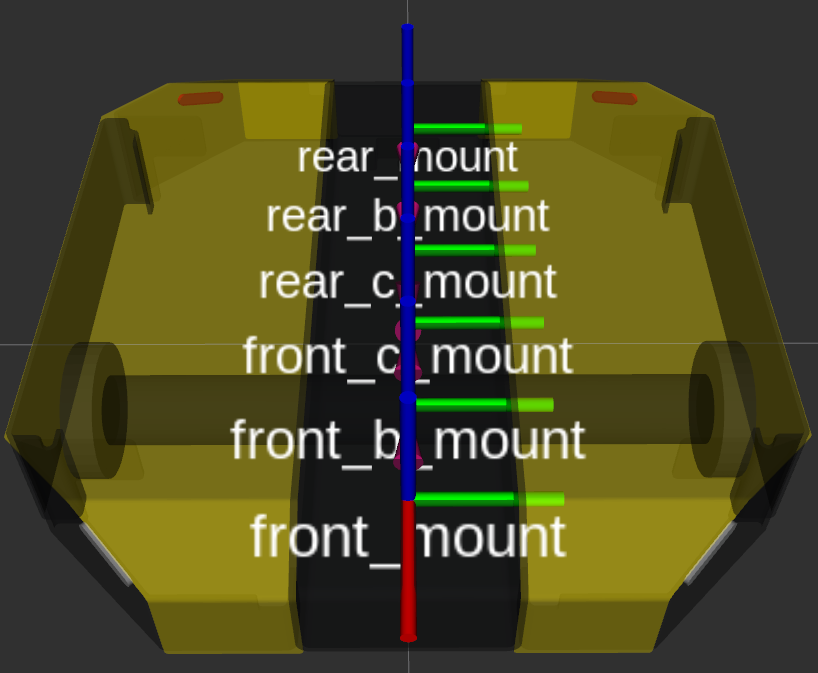
Dingo-D has 6 evenly-spaced mounting points along its center channel for mounting sensors and other accessories. Dingo-O has 7 similar mounting points. The centers of these mounting points are represented as links in the URDF to facilitate adding sensors to simulated robots & modelling collisions when planning arm motions for mobile manipulation.
Link (front to back) |
Dingo-D |
Dingo-O |
|---|---|---|
|
Yes |
Yes |
|
Yes |
Yes |
|
Yes |
Yes |
|
No |
Yes |
|
Yes |
Yes |
|
Yes |
Yes |
|
Yes |
Yes |
Dingo-D mount points:
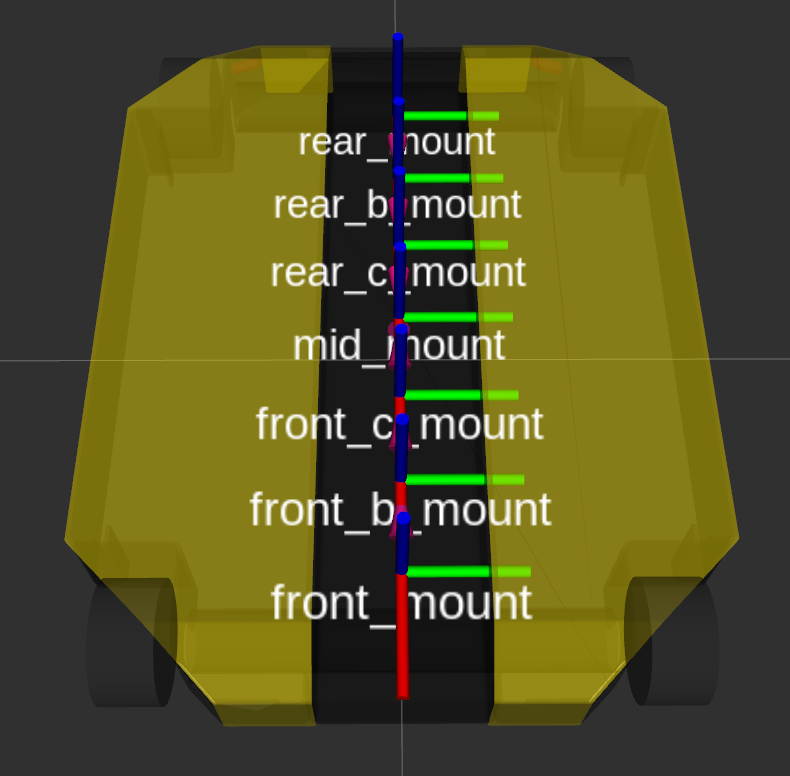
Dingo-O mount points:
Both versions of Dingo also provide a front_bumper_mount, located directly on the front of the robot. While the physical
robot does not have any mounting holes here, lightweight sensors (e.g. small cameras) can be placed here using double-sided
adhesive if required.
Environment Variables¶
Dingo can be customized & extended through the use of several enviroment variables. These variables are listed below, along with a summary of their effects and default values
Variable |
Default |
Description |
DINGO_OMNI |
0 |
Set to 1 to switch from Dingo-D to Dingo-O (with omni-directional mecanum wheels) |
DINGO_URDF_EXTRAS |
emptyu.urdf |
Specifies the path to a URDF file with which to extend the robot's physical configuraiton |
DINGO_CONTROL_EXTRAS |
0 |
Set to 1 to enable loading DINGO_CONTROL_EXTRAS_PATH |
DINGO_CONTROL_EXTRAS_PATH |
undefined |
Path to a YAML file on-disk that can be used to override or extend Dingo's default controls |
DINGO_CONFIG |
base |
Specifies what pre-made sensor/mission configuration to load (see below) |
DINGO_LASER |
0 |
Set to 1 to equip Dingo with a primary lidar unit, normally front-facing |
DINGO_LASER_MODEL |
lms1xx |
Sets the model of lidar sensor on the robot. Ignored if DINGO_LASER is 0. Allowed values are:
|
DINGO_LASER_MOUNT |
front |
Defines the mount point the Dingo's laser is connected to. Allowed values are:
|
DINGO_LASER_TOPIC |
front/scan |
The ROS topic that Dingo's lidar publishes on |
DINGO_LASER_OFFSET |
0.11 0 0 |
XYZ offset for Dingo's lidar |
DINGO_LASER_RPY |
0 0 0 |
RPY offset for Dingo's lidar |
DINGO_LASER_SECONDARY |
0 |
Set to 1 to equip Dingo with a secondary lidar unit, normally rear-facing |
DINGO_LASER_SECONDARY_MODEL |
lms1xx |
Sets the model of secondary lidar sensor on the robot. Ignored if DINGO_LASER_SECONDARY is 0. Allowed values are:
|
DINGO_LASER_SECONDARY_MOUNT |
rear |
Defines the mount point the Dingo's secondary laser is connected to. Allowed values are:
|
DINGO_LASER_SECONDARY_TOPIC |
rear/scan |
The ROS topic that Dingo's secondary lidar publishes on |
DINGO_LASER_SECONDARY_OFFSET |
-0.11 0 0 |
XYZ offset for Dingo's secondary lidar |
DINGO_LASER_SECONDARY_RPY |
0 0 3.14159 |
RPY offset for Dingo's secondary lidar |
DINGO_LASER_3D |
0 |
Set to 1 to equip Dingo with a primary 3D lidar unit, normally front-facing |
DINGO_LASER_3D_MODEL |
vlp16 |
Sets the model of lidar sensor on the robot. Ignored if DINGO_LASER_3D is 0. Allowed values are:
|
DINGO_LASER_3D_MOUNT |
front |
Defines the mount point the Dingo's 3D laser is connected to. Allowed values are:
|
DINGO_LASER_3D_TOPIC |
front/points |
The ROS topic that Dingo's 3D lidar publishes on |
DINGO_LASER_3D_OFFSET |
0 0 0 |
XYZ offset for Dingo's 3D lidar |
DINGO_LASER_3D_RPY |
0 0 0 |
RPY offset for Dingo's 3D lidar |
DINGO_REALSENSE |
0 |
Set to 1 to equip Dingo with a RealSense depth camera |
DINGO_REALSENSE_MODEL |
d435 |
Sets the model of RealSense camera on the robot. Ignored if DINGO_REALSENSE is 0. Allowed values are:
|
DINGO_REALSENSE_MOUNT |
front |
Defines the mount point the Dingo's RealSense is connected to
|
DINGO_REALSENSE_TOPIC |
realsense |
The ROS namespace that Dingo's Realsense topics publish in. e.g. pointcloud data will be in $(DINGO_REALSENSE_TOPIC)/depth/color/points |
DINGO_REALSENSE_OFFSET |
0 0 0 |
XYZ offset for Dingo's RealSense |
DINGO_REALSENSE_RPY |
0 0 0 |
RPY offset for Dingo's RealSense |
Mobile Manipulaton Environment Variables¶
The following variables are only supported when the mobile manipulation package is in-use.
Variable |
Default |
Description |
DINGO_ARM_MODEL |
gen3_lite |
The model of arm mounted to the Dingo |
DINGO_ARM_GRIPPER |
gen3_lite_2f |
The type of gripper mounted to the end of the arm |
DINGO_ARM_DOF |
6 |
The number of degrees of freedom in the arm |
DINGO_ARM_MOUNT |
front_b_mount |
Specifies the link that the arm is attached to in the URDF |
DINGO_ARM_XYZ |
0 0 0 |
XYZ offset for Dingo's arm relative to its mounting point |
DINGO_ARM_RPY |
0 0 0 |
RPY offset for Dingo's arm relative to its mounting point |
DINGO_ARM_HOST |
192.168.131.40 |
IP address of the Dingo's arm |
DINGO_ARM_EXTERNAL_POWER |
0 |
Set to 1 to add the arm's power regulator to the robot's URDF |
DINGO_ARM_EXTERNAL_POWER_MOUNT |
rear_b_mount |
Specifies the link the external power regulator is attached to |
DINGO_ARM_EXTERNAL_POWER_XYZ |
0 0 0 |
The XYZ offset for the external power regulator relative to its mount point |
DINGO_ARM_EXTERNAL_POWER_RPY |
0 0 0 |
The RPY offset for the external power regulator relative to its mount point |
Configurations¶
As an alternative to individually specifying each accessory, some fixed configurations are provided in the package. These can be specified using the config arg to description.launch, and are intended especially as a convenience for simulation launch.
Config: |
Description: |
|---|---|
base |
Base Dingo |
front_laser |
Adds a SICK LMS1xx lidar to the Dingo’s front mount |
Note
Additional configurations coming soon