Additional Simulation Worlds¶
In addtion to the default dingo_world.launch file, dingo_gazebo contains two additional launch files:
empty_world.launch, which spawns Dingo in a featureless, infinite plane and spawn_dingo.launch which is
intended to be included in any custom world to add a Dingo simulation to it.
To add a Dingo to any of your own worlds, simply include the spawn_dingo.launch file in your own world’s launch:
<include file="$(find dingo_gazebo)/launch/spawn_dingo.launch">
<!-- Optionally configure the spawn position -->
<arg name="x" value="$(arg x)"/>
<arg name="y" value="$(arg y)"/>
<arg name="z" value="$(arg z)"/>
<arg name="yaw" value="$(arg yaw)"/>
</include>
Finally, Clearpath provides an additional suite of simulation environments that can be downloaded separately and used with Dingo, as described below.
Clearpath Gazebo Worlds¶
The Clearpath Gazebo Worlds collection contains 4 different simulation worlds, representative of different environments our robots are designed to operate in:
Inspection World: a hilly outdoor world with water and a cave
Agriculture World: a flat outdoor world with a barn, fences, and solar farm
Office World: a flat indoor world with enclosed rooms and furniture
Construction World: office world, under construction with small piles of debris and partial walls
Dingo is supported in the Office and Construction worlds.
Installation¶
To download the Clearpath Gazebo Worlds, clone the repository from github into the same workspace as your Dingo:
cd ~/catkin_ws/src
git clone https://github.com/clearpathrobotics/cpr_gazebo.git
Before you can build the package, make sure to install dependencies. Because Clearpath Gazebo Worlds depends on
all of our robots’ simulation packages, and some of these are currently only available as source code, installing
dependencies with rosdep install --from-paths [...] will likely fail.
To simulate Dingo in the Office and Construction worlds the only additional dependency is the gazebo_ros package.
Once the dependencies are installed, you can build the package:
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Running the Office Simulation¶
To launch Office World with a Dingo, run the following command:
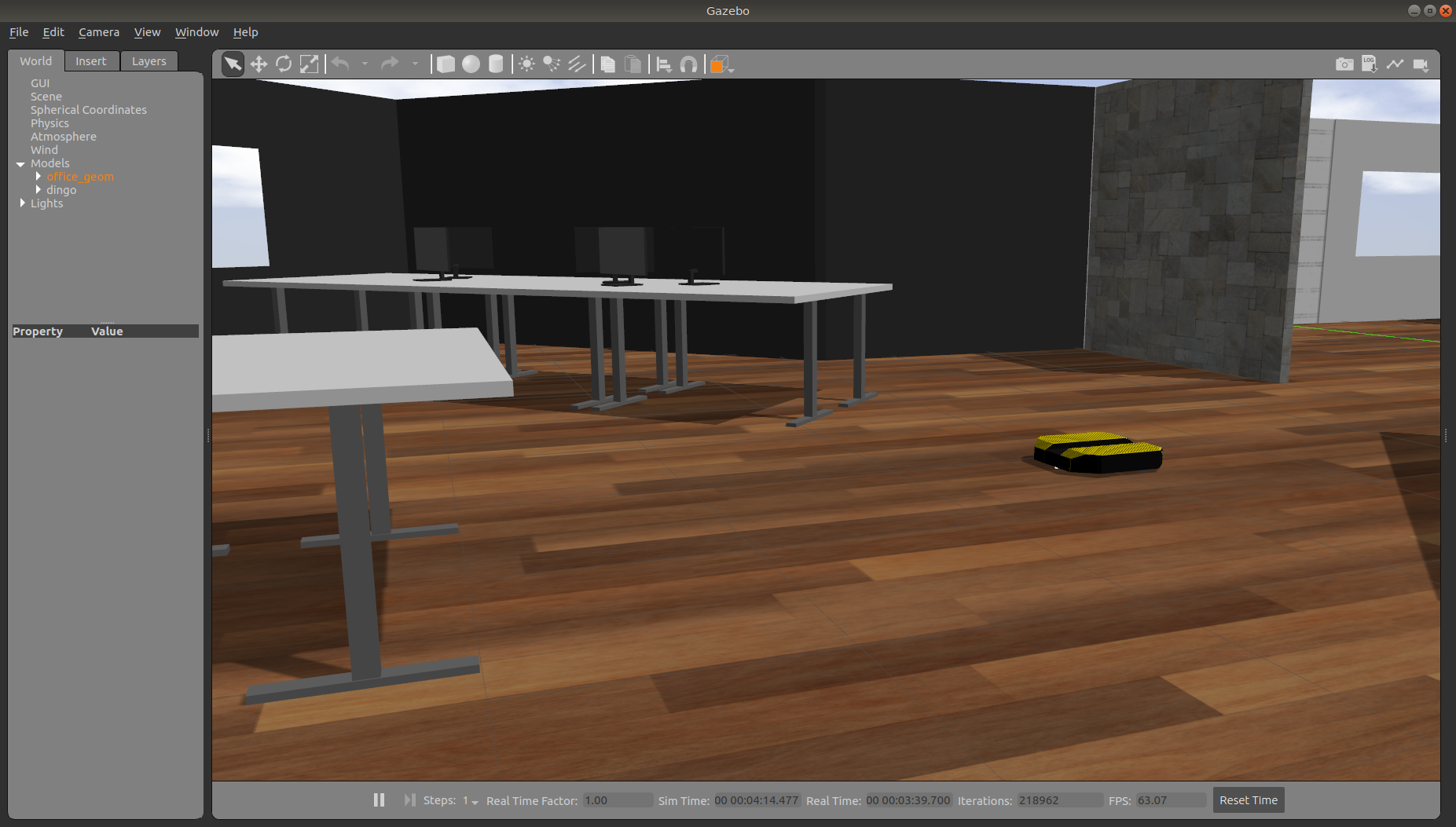
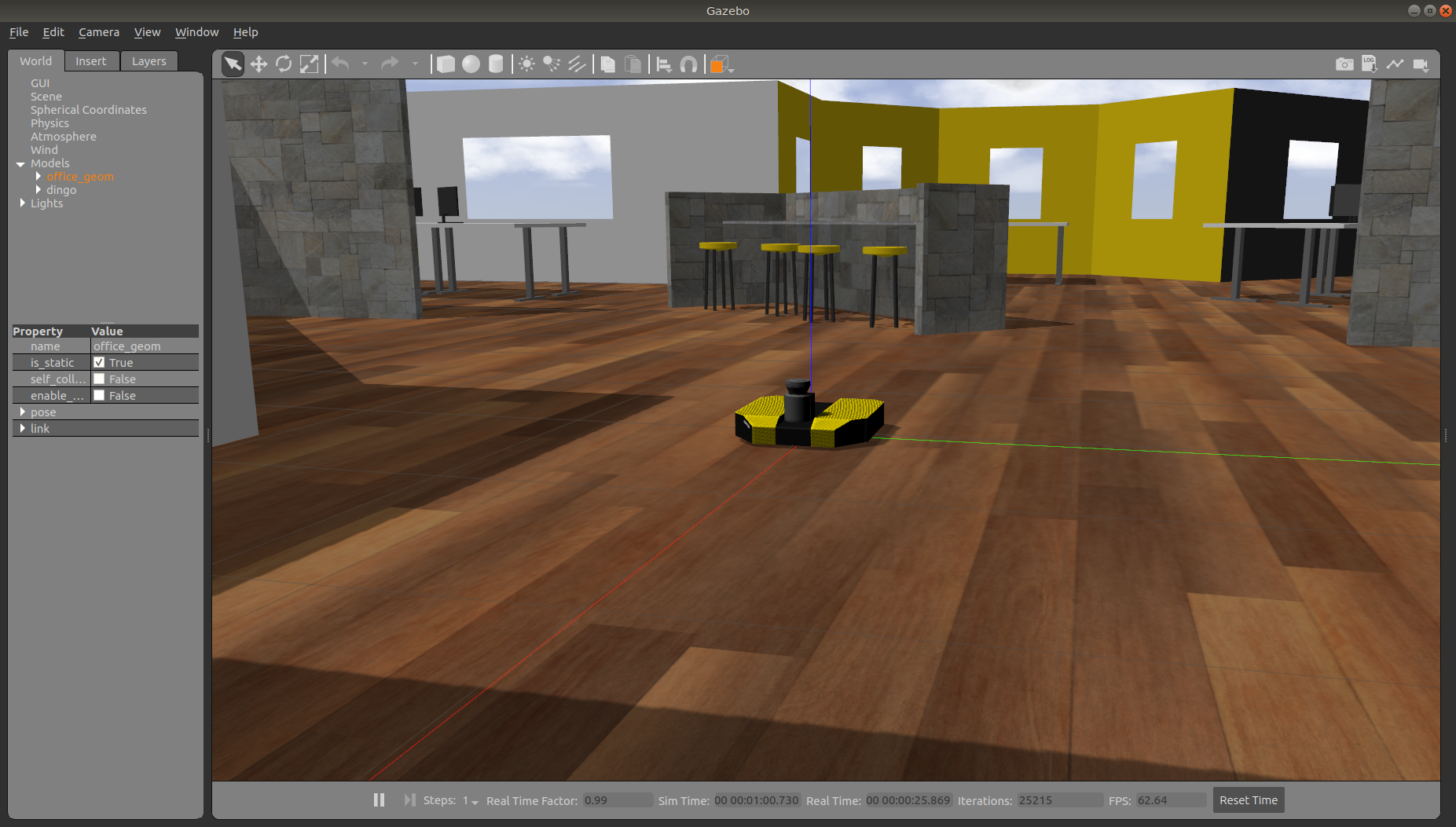
roslaunch cpr_office_gazebo office_world.launch platform:=dingo
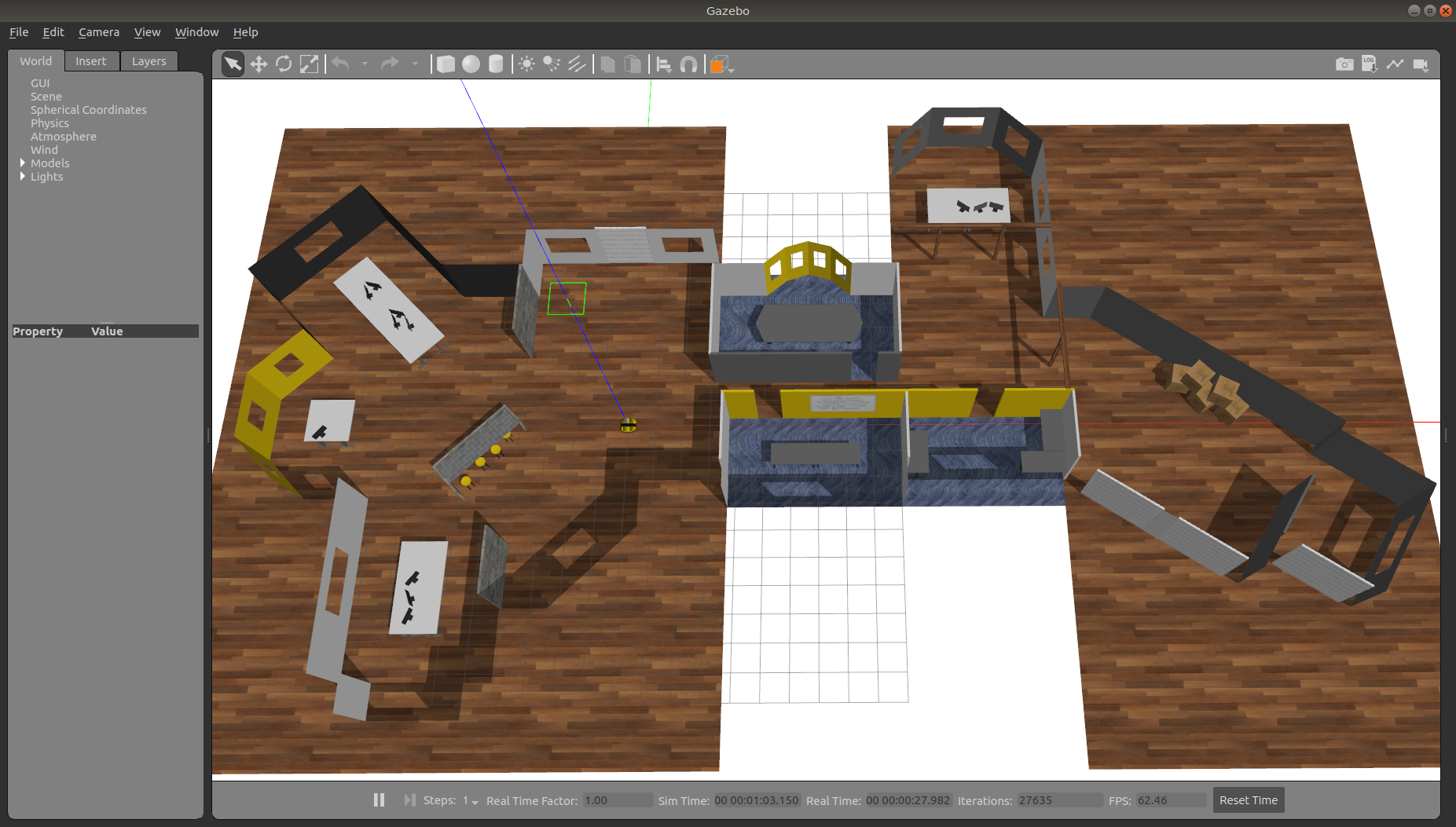
You should see Dingo spawn in the office world, as pictured. You can see the complete layout of the office below:
To add sensors to Dingo, use the environment variables described in dingo_description Package. For example, to simulate Dingo with a Sick LMS-1xx lidar, run:
export DINGO_LASER=1
roslaunch cpr_office_gazebo office_world.launch platform:=dingo
You will see Dingo spawn with a lidar sensor mounted to it, which can be used for navigation as described in Simulating Dingo.
Running the Construction Simulation¶
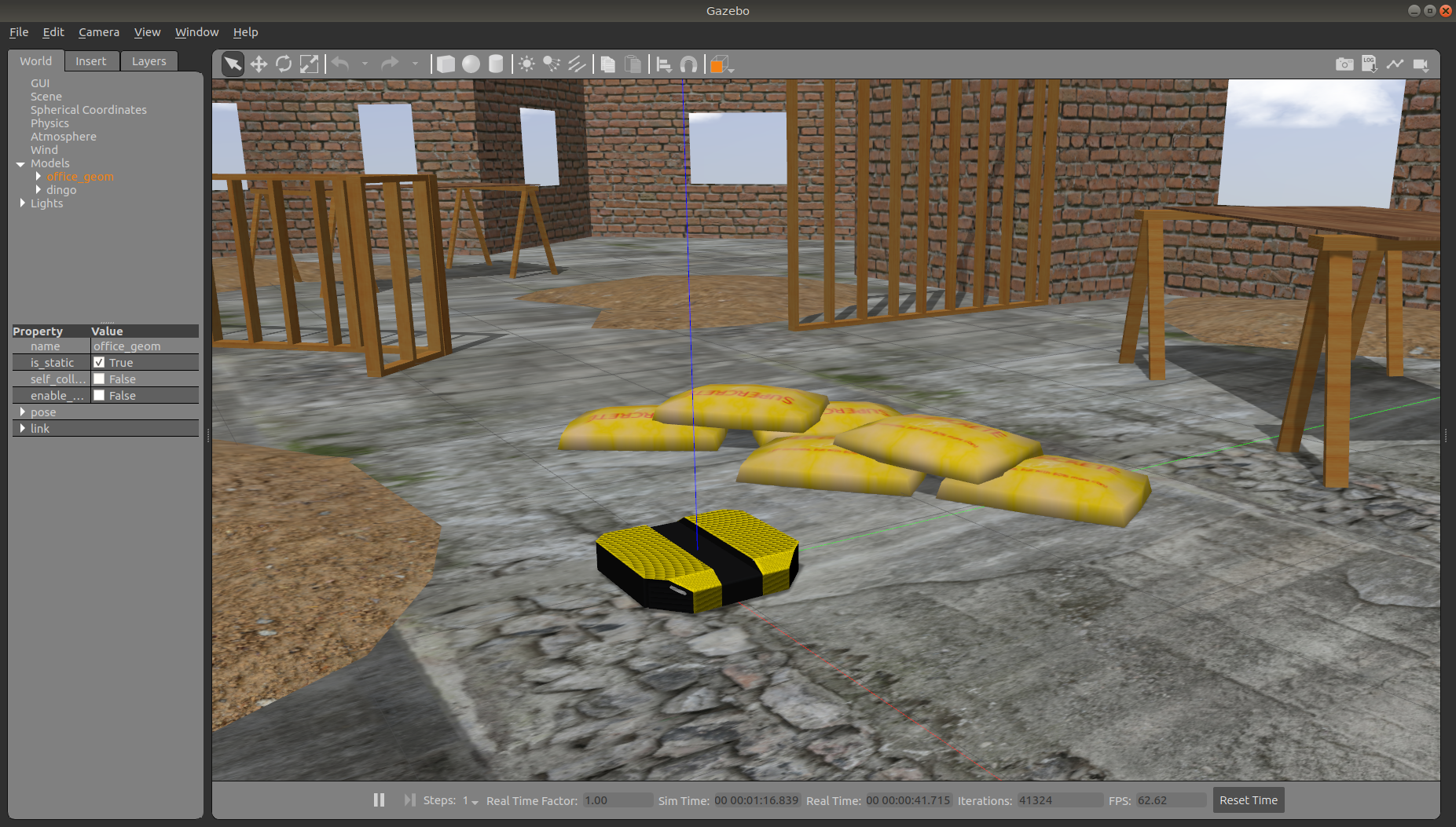
To launch Construction World with a Dingo, run the following command:
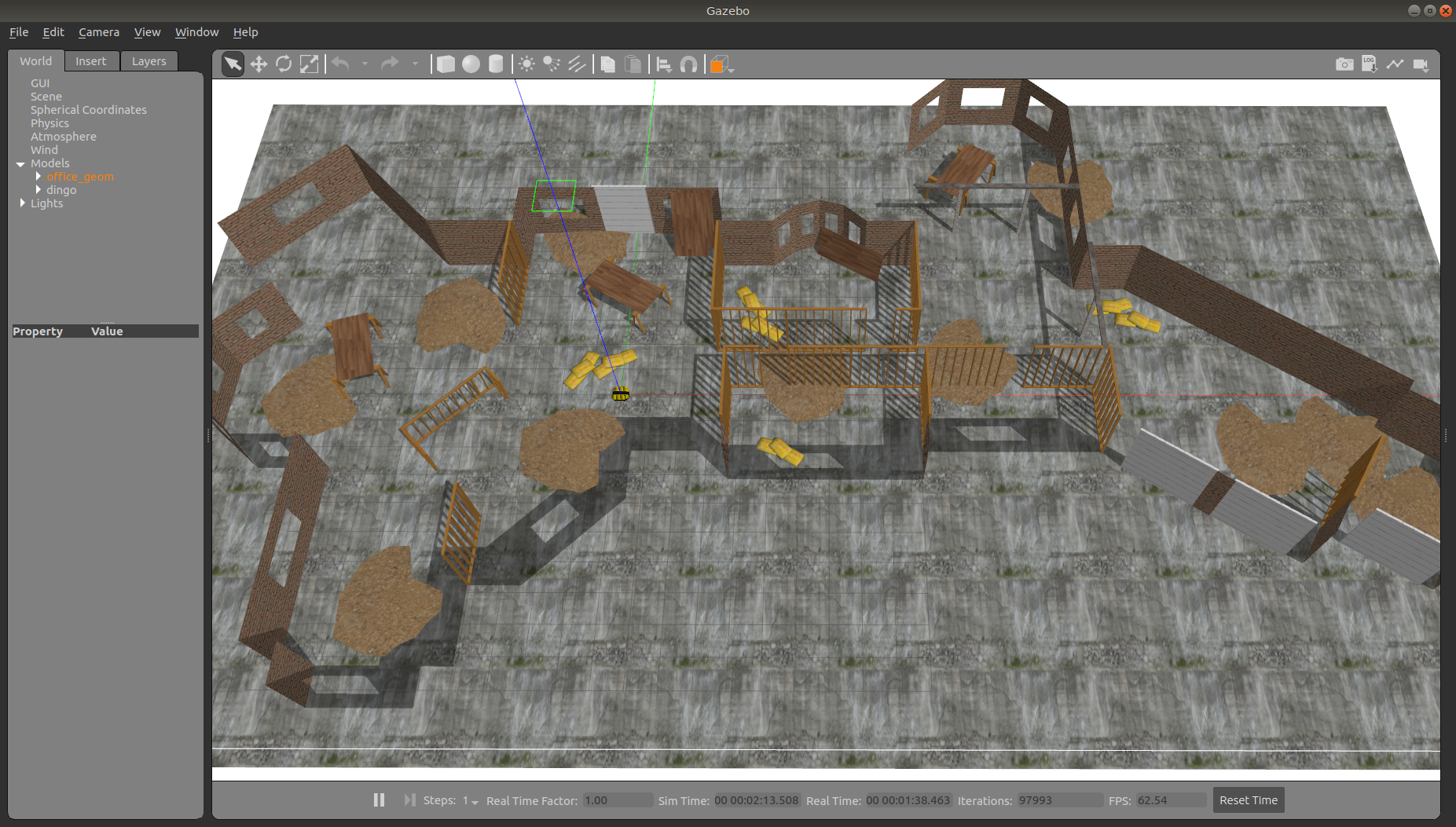
roslaunch cpr_office_gazebo office_construction_world.launch platform:=dingo
You should see Dingo spawn in the construction world, as pictured. You can see the complete layout of the office below:
To add sensors to Dingo, use the environment variables described in dingo_description Package. For example, to simulate Dingo with a Sick LMS-1xx lidar, run:
export DINGO_LASER=1
roslaunch cpr_office_gazebo office_construction_world.launch platform:=dingo
You will see Dingo spawn with a lidar sensor mounted to it, which can be used for navigation as described in Simulating Dingo.